This NSF funded project is designed to demonstrate a new class of continuum robots capable of multi-scale manipulation; that is, the ability to achieve large motion with millimetric precision and to achieve small motion with micrometer-scale precision. In contrast, existing robots are mainly designed to function properly only at a single functional length scale. In the past, there are works done on manipulators that are able to offer this kind of dual scale of motion, Egeland 1987 IEEE TRO or Comparetti 2012 IMechE JEM for example, but the majority of them rely on serial staking of macro-manipulators, most likely on the serial structure architecture, with a micro-manipulator, typically built as a parallel robot, attached to the end effector position. In addition, There are also other manipulators that use to vary the structural equilibrium pose to achieve micro movement, Portman 2001 JMTM for example, but all these concepts share the same problem, it is a bit of a challenge to implement them in a surgical application due to space consideration. There are also manipulators that are size compatible with the surgical application, Webster IEEE/RSI IROS 2006 for example, but on the other hand are not able to provide multiscale motion independently.
The aim of this project is to extend the capabilities of a standard continuum robot in term of micro-scale motion and targeting possible application of this fine movement. The envisioned class of robots will provide micro-precision while traversing macroscale sinuous pathways to access the operational site. Potential benefits include precise tissue reconstruction and complete surgical eradication of tumors. Such robots will also enable new abilities for micro-manufacturing, leading to greatly improved quality-control inspection methods for micro-fluidic and microelectromechanical devices mass-manufactured on large substrates.
CREM Concept
The augmentation of the macro-scale workspace of multi backbones robot with micron-scale motion capabilities is achieved using this new concept of continuum robot with equilibrium modulation or in short CREM.
This robot is still able to achieve the large scale of motion using the tubular secondary backbones. Those are rigidly attached to the top red end disk and by direct actuation, pushing and pulling on them, we can change the continuum robot configuration. Now in addition to that, we have wires (marked in red in the picture), inside the structure that can slide in and out of the tubular backbones.
While these wires are sliding, we are able to modulate the equilibrium shape. This is obtained through redistribution of cross-sectional stiffness along the length of the snake segment.
Micromotion Tracking
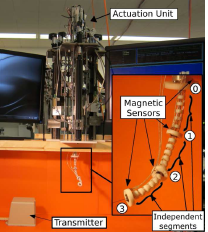
Part of the efforts for this project is aimed to be able to track the end-effector position and orientation on a macro and micro scale. The micromotion tracking it is used for loop-closed control purpose and visual servoing. Due to the lack of commercial tracker able to track the fine motion generate on the micromotion mode, a new visual tracking process has been designed, developed and tested. The results of such tracking process can be seen on this video generated as a multimedia extension for the publication authored by Giuseppe Del Giudice IROS 2017.
Poster of the planned research was presented at the VISE 6th Annual Surgery, Intervention and Engineering Symposium, Nashville,TN, USA, Dec 2017. A copy of the PDF poster is available here.
Publication:
Del Giudice, G., Wang, L., Shen, J., Joose, K. and Simaan, N., "Continuum Robot for Multi-Scale Motion: Micro-Scale Motion Through Equilibrium Modulation", IEEE/RSJ International Conference on Intelligent Robots and System (IROS'), Vancouver, Canada, 2017 (accepted).
Otology 2010 Inroads Toward Robot-Assisted Cochlear Implant Surgery Using Steerable Electrode Arrays
Journal Robotic Surgery 2013 Lessons learned using the insertable robotic effector platform (IREP) for single port access surgery
Urology 2014 Future robotic platforms in urologic surgery: recent developments
Endourology 2014 A Pilot Ex Vivo Evaluation of a Telerobotic System for Transurethral Intervention and Surveillance
Otolaryngology 2014 Evaluation of a Telerobotic System for Transnasal Surgery of the Larynx and Airways in Cadavers
Ophthalmology 2015Evaluation of microsurgical tasks with OCT-guided and/or robot-assisted ophthalmic forceps
Otolaryngology 2015 Robot-Assisted Transnasal Laryngoplasty in Cadaveric Models: Quantifying Forces and Identifying challenges
Sample Journal papers in Engineering Venues after 2010 (Vanderbilt period):
These papers were published after I joined Vanderbilt University in 2010
IEEE TRO2012 Kinematics-Based Detection and Localization of Contacts Along Multisegment Continuum Robots
Robotica 2012 Algorithms for autonomous exploration and estimation in compliant environments
ASME JDSMC 2012 Modeling, Force Sensing, and Control of Flexible Cannulas for Microstent Delivery
IEEE TBME 2013 Design and Performance Evaluation of a Minimally Invasive Telerobotic Platform for Transurethral Surveillance and Intervention
IEEE/ASME TMECH 2013 Design and Coordination Kinematics of an Insertable Robotic Effectors Platform for Single-Port Access Surgery
ASME JMR 2013 Design of Underactuated Steerable Electrode Arrays for Optimal Insertions
IEEE/ASME TMECH 2014 Modeling, Design, and Evaluation of a Parallel Robot for Cochlear Implant Surgery
IEEE TRO 2014 Compliant Motion Control for Multisegment Continuum Robots With Actuation Force Sensing
IJRR 2015 Hybrid motion/force control of multi-backbone continuum robotsHybrid motion/force control of
Sample Journal papers in Engineering Venues 2005-2010 (Columbia period):
IEEE TRO 2008 An Investigation of the Intrinsic Force Sensing Capabilities of Continuum Robots
IEEE TRO 2009 Performance Evaluation for Multi-arm Manipulation of Hollow Suspended Organs
IEEE TRO 2010 IntrinsicWrench Estimation and Its Performance Index for Multisegment Continuum Robots
ASME JMR 2009 Design of Planar Parallel Robots With Preloaded Flexures for Guaranteed Backlash Prevention
IJRR 2009 Design and Integration of a Telerobotic System for Minimally Invasive Surgery of the Throat
ASME JMED 2009 Optimal Path Planning for Robotic Insertion of Steerable Electrode Arrays in Cochlear Implant Surgery
ASME JMR 2010 Analytic Formulation for Kinematics, Statics, and Shape Restoration of Multibackbone Continuum Robots Via Elliptic Integrals
Sample Journal papers in Engineering before 2005 (Technion period):
IJRR2003 Stiffness Synthesis of a Variable Geometry Six-Degrees-of-Freedom Double Planar Parallel Robot
ASME J. Mechanical Design 2003 Geometric Interpretation of the Derivatives of Parallel Robots’ Jacobian Matrix With Application to Stiffness Control
IEEE TRO 1999 Singularity Analysis of a Class of Composite Serial In-Parallel Robots
Master's Thesis and Ph.D. Dissertation:
Master's thesis 1999. Title: "Analysis and Synthesis of Parallel Robots for Medical Applications".
Ph.D. Dissertation 2002. Title: "Task-Based Design and Synthesis of Variable Geometry Parallel Robots". This dissertation was published as a collection of manuscripts.
This page describes some of our activity within an NIH-funded award #R21EB015623, which started on July 2013.
Motivation:
Based on National Cancer Institute statistics, bladder cancer acounted for 4.4% of all new cancer cases in 2013, rendering it the 6th most common one. However, it has the highest treatment costs per patient due to high recurrence rate partly associated with incomplete tumor resection on initial TUR. In addition, current surgical tool limitations hinder accurate and complete tumor resections and visualization; result in improper staging and increase rates of perforations and tumor recurrence.This project focuses on enabling higher precision, safer, and more dexterous resection and surveillance of bladder tumors. The proposed technology will reduce surgeon burden, improve resection accuracy, and hopefully reduce recurrence rates, trauma, and patient treatment cost.
Recent Achievements:
Past Achievements:
A surgical robotic system has been designed and implemented ex-vivo. It is composed of a simple master inteface for remote operator control and a slave system for direct interaction/intervention with the patient's bladder. The system includes a dextrous continuum robot with access channels for simultaneous deployment of multiple visualization and surgical instruments. See Figure 1.
Fig. 1- Image of telesurgical setup in Bovine ex-vivo study
The slave is composed of actution unit and distal dextrous manipulator(snake). See Figure 2. Its goal is deliver of intravesicular visualization and dextrous instrumentation. The DDM's goals are:1- facilitate surveilaence and surgical intervention, 2- obviate the nee to use suprapubic pressure to reach anterior aspects of the bladder, 3- facilitate control of the angle of approach w.r.t walls of the bladder. The motion of DDM is provided by 7-DOF actuation unit. The unit provides linear motion for insertion of DDM into the bladder and for actuation of two continuum segments. The telemanipulation accuracy outside the bladder was estimated to be 0.48 mm.
A method was developed for constrained motion control of the slave inside the bladder. Virtual fixtures were designed and utilized in the configuration space of the continuum robot and a multi-task redundancy resolution scheme was used to exploit the DOFs of the robot based on task priority. Experimental results demonstrated the effectiveness of the proposed methodology in target different sections of the bladder. Fig. 3 illustrates overall control architecture of the surgical robotic system. See reference [2] for detailed treatment.
Fig. 3- Overall schematic diagram of the telerobotic system control architecture
An ex-vivo study of the system deployed in a bovine bladder demonstrated the utility of the system for surveilance and energy delivery under clinical conditions. The DDM was deployed into the bladder and moved within to visualize different sections based on operator commands (see Fig. 4). A 0.55 mm diameter probe encasing 200 micron holmium laser fiber was deployed through one of the channels and used to cauterize dyed target areas.More details on the design are mentioned in [4].
Fig. 4- DDM manipulated inside bovine bladder at various sections
The surgical slave went under a new revision to render it more suitable for the application at hand by addressing some of its limitations. The new design called TURBot uses a custom-made assembly to guide the continuum robot and visualizations through a sheath inside the bladder. We have conducted several in-vivo experiments on swines. Currently, we are finishing experiments on human bladder phantoms.
Currently Active Personnel
Nima Sarli starting in August 2013
Giuseppe Del Giudice starting in February 2014
Former Personnel
Roger Goldman 2009-2011
Sarah Suh-Mclachlan 2009-2011
Andrea Bajo 2011-2012
Long Wang 2013
Publications
Sarli, N., "Design, Modeling & Control of Continuum Robots & Dexterous Wrists with Applications to Transurethral Bladder Cancer Resection.", PhD dissertation, Vanderbilt University, Sep 2018.
Sarli, N., Del Giudice, G., De, S., Dietrich, M. S., Herrell, S. D. and Simaan, N., "TURBot: a System for Robot-Assisted Transurethral Bladder Tumor Resection", IEEE/ASME Transactions on Mechatronics, Submitted.
Sarli, N., Del Giudice, G., De, S., Dietrich, Mary S., Herrell, S. D. & Simaan, N (2018). "Preliminary Porcine in vivo Evaluation of a Telerobotic System for Transurethral Bladder Tumor Resection & Surveillance". Journal of Endourology, vol. 32, no. 6, June 2018.
Sarli, N. & Simaan,N (2017). "Minimal Visual Occlusion Redundancy Resolution of Continuum Robots in Confined Spaces". In International Conference on Robotics and Intelligent Systems. Vancouver, Canada.
Sarli, N., Del Giudice, G., Herrell, S. D. & Simaan, N. (2016). A Resectoscope for Robot-Assisted Transurethral Surgery. ASME Journal of Medical Devices, 2(10), 020911.
Sarli, N., Marien, T., Mitchell, C. R., Del Giudice, G., Dietrich, M. S., Herrell, S. D. et al. (2016). Kinematic and Experimental Investigation of Manual Resection Tools for Transurethral Bladder Tumor Resection. The International Journal of Medical Robotics and Computer Assisted Surgery
Del Giudice, G., Sarli, N., Herrell, S. D. & Simaan, N (2016). Design Considerations for Continuum Robot Actuation Units Enabling Dexterous Transurethral Bladder Cancer Resection. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (ASME IDETC). Charlotte,NC,USA.
S. D. Herrell, R. Webster, and N. Simaan, “Future robotic platforms in urologic surgery: recent developments.,” Current Opinions in Urology, vol. 24, no. 1, pp. 118–26, Jan. 2014.
A. Bajo, R. B. Pickens, S. D. Herrell, and N. Simaan, “Constrained Motion Control of Multisegment Continuum Robots for Transurethral Bladder Resection and Surveillance,” ICRA’2013 IEEE International Conference on Robotics and Automation, pp. 5817-5822, 2013.
Pickens, R., Bajo, A., Simaan, N., Herrell, S. D., “A Pilot Ex-Vivo Evaluation of a Telerobotic System for Transurethral Intervention and Surveillance”, Journal of Endourology, under review, 2013.
Goldman, R.E., Bajo, A., MacLachlan, L. S., Pickens, R., Herrell D., Simaan, N., “Design and Performance Evaluation of a Minimally Invasive Telerobotic Platform for Transurethral Exploration and Intervention,” IEEE Transactions on Biomedical Engineering (TBME) special issue on Surgical Robotics,Vol. 60, No. 4., DOI: 10.1109/TBME.2012.2226031, PMID: 23144027, pp. 918 - 925, 2013.
A. Bajo, R. Pickens, D. Herrell, N. Simaan, “A Pilot Ex-Vivo Evaluation of a Telerobotic System for Transurethral Intervention and Surveillance,” Proceedings of the Hamlyn Symposium on Medical Robotics, London, Jul. 1-2, 2012.
Ryan B. Pickens, M.D., Andrea Bajo, Nabil Simaan, S. Duke Herrell, “Preliminary Testing of a Transurethral Dexterous Robotic System for Bladder Resection” presented at the 27th annual meeting of the Engineering & Urology Society, Atlanta GA, May 19, 2012.
Goldman, R., Bajo, Andrea, Suh, L., Benson, M., Simaan, N., presented in the 2011 Annual Engineering and Urology Society annual meeting, May 14, Washington, DC, 2011.
Multi-segment continuum robots offer enhanced safety during surgery due to their inherent passive compliance. However, they suffer poor position tracking performance due to flexibility of their actuation lines, structural compliance, and actuation coupling effects between segments. The need for control methods addressing accurate tracking for multisegment continuum robots is magnified by increased precision requirements of surgical procedures employing these structures. To address this need, this paper proposes a tiered controller that uses both extrinsic and intrinsic sensory information for improved performance of multi-segment continuum robots. The higher tier of this controller uses configuration space feedback while the lower tier uses joint space feedback and a feed-forward term obtained with actuation compensation techniques.We prove the stability of this controller using Lyapunov’s direct method and experimentally evaluate its performance on a three-segment multi-backbone continuum robot. Results demonstrate its efficacy in enhancing regulation and tracking performance. It is shown that the controller mitigates the effects of actuation coupling between robot’s sub-segments and decreases phase lag. These results suggest that this tiered controller will enhance telemanipulation performance of multi-segment continuum robots.
Bajo, A., Goldman, R., Simaan, N., "Configuration and Joint Feedback for Enhanced Performance of Multi-Segment Continuum Robots", 2011 IEEE International Conference on Robotics and Automation, Shanghai , China, 2011, Accepted





 Multi-segment continuum robots offer enhanced safety during surgery due to their inherent passive compliance. However, they suffer poor position tracking performance due to flexibility of their actuation lines, structural compliance, and actuation coupling effects between segments. The need for control methods addressing accurate tracking for multisegment continuum robots is magnified by increased precision requirements of surgical procedures employing these structures. To address this need, this paper proposes a tiered controller that uses both extrinsic and intrinsic sensory information for improved performance of multi-segment continuum robots. The higher tier of this controller uses configuration space feedback while the lower tier uses joint space feedback and a feed-forward term obtained with actuation compensation techniques.We prove the stability of this controller using Lyapunov’s direct method and experimentally evaluate its performance on a three-segment multi-backbone continuum robot. Results demonstrate its efficacy in enhancing regulation and tracking performance. It is shown that the controller mitigates the effects of actuation coupling between robot’s sub-segments and decreases phase lag. These results suggest that this tiered controller will enhance telemanipulation performance of multi-segment continuum robots.
Multi-segment continuum robots offer enhanced safety during surgery due to their inherent passive compliance. However, they suffer poor position tracking performance due to flexibility of their actuation lines, structural compliance, and actuation coupling effects between segments. The need for control methods addressing accurate tracking for multisegment continuum robots is magnified by increased precision requirements of surgical procedures employing these structures. To address this need, this paper proposes a tiered controller that uses both extrinsic and intrinsic sensory information for improved performance of multi-segment continuum robots. The higher tier of this controller uses configuration space feedback while the lower tier uses joint space feedback and a feed-forward term obtained with actuation compensation techniques.We prove the stability of this controller using Lyapunov’s direct method and experimentally evaluate its performance on a three-segment multi-backbone continuum robot. Results demonstrate its efficacy in enhancing regulation and tracking performance. It is shown that the controller mitigates the effects of actuation coupling between robot’s sub-segments and decreases phase lag. These results suggest that this tiered controller will enhance telemanipulation performance of multi-segment continuum robots.