Project Title: Ocular Therapeutic Delivery Through Real-time Endoscopic B-scan OCT-guided Tools and Robotic Assistance
NIH Award Number:
This is a 5-year collaborative project with Karen Joos at VUMC.
Active Personnel:
Elan Ahronovich (2018-present)
Neel Shihora
Previous Personnel:
Giuseppe Del. Guidice, Ph.D. (2017-2021)
Description
Emerging molecular, gene, and cell-based therapeutics targeting ocular diseases could prevent and potentially reverse cell degeneration and subsequent vision loss. However, reliable and safe delivery of these therapeutics into targeted ocular layers is an ongoing concern of the FDA, which may affect the advancement of these potentially life-changing new treatments. To increase delivery accuracy, reliability, safety, and ease of the new molecular therapeutic procedures, we propose to develop B-scan OCT-guided robotic-assisted subretinal therapeutic delivery techniques.
Our group is collaborating with VUMC researchers Dr. Karen Joos and Dr. Jin-Hui Chen on developing OCT-guided robotic control algorithms for the targeted delivery of drugs into specific locations within the retina. As part of our research, we will be enabling robot-assisted hand-held tools and collaborative (hand-on-hand) robotic tools to assist and semi-automate the last step of targeted drug delivery. We will be comparing these modes of assistance via in-vivo studies, enucleated cadaveric eyes, and bench-top phantom models.
Additional details about our planned research are available here
Publications
E.Z. Ahronovich, J.H. Shen, T. J. Vadakkan, R. Prasad, K.M. Joos, N. Simaan, "A five degree-of-freedom mechanical arm with remote center of motion (RCM) device for volumetric optical coherence tomography (OCT) retinal imaging," Biomedical Optics Express 15, 1150-1162 2024.
E.Z. Ahronovich, N. Shihora, J.H. Shen, K. Joos and N. Simaan, "Exploring An External Approach to Subretinal Drug Delivery via Robot Assistance and B-Mode OCT," 2023 IEEE International Conference on Robotics and Automation (ICRA), London, United Kingdom, 2023, pp. 6795-6801, doi: 10.1109/ICRA48891.2023.10161441.
E.Z. Ahronovich, J.H. Shen, K.M. Joos, and N. Simaan, 2023. A five degree-of-freedom remote center of motion device for stable volumetric OCT imaging of the retina. Investigative Ophthalmology & Visual Science, 64(8), pp.3444-3444.
E.Z. Ahronovich, N. Simaan, & K.M. Joos (2021). A Review of Robotic and OCT-Aided Systems for Vitreoretinal Surgery. Advances in therapy, 38(5), 2114–2129. https://doi.org/10.1007/s12325-021-01692-z
Del Giudice, G., Orekhov, A. L., Shen, J. H., Joos, K., & Simaan, N. (2021). Investigation of Micro-motion Kinematics of Continuum Robots for Volumetric OCT and OCT-guided Visual Servoing. IEEE/ASME transactions on mechatronics : a joint publication of the IEEE Industrial Electronics Society and the ASME Dynamic Systems and Control Division, 26(5), 2604–2615. https://doi.org/10.1109/tmech.2020.3043438
Additional award details can be found at the NSF website.
This was a 4-year collaborative project with the Biorobotics Lab at Carnegie Mellon University. The Principal Investigators on this grant are Dr. Nabil Simaan (Vanderbilt University) and Dr. Howie Choset (Carnegie Mellon University).
Previous Personnel:
Garrison Johnston, Ph.D. (2018-2024)
Andrew Orekhov, Ph.D. (2017-2021)
Colette Abah, Ph.D. (2017-2022)
Undergraduate Interns:
Madison Veliky (Fall 2021 - Spring 2022 REU)
Jeongwoo Seo (Summer 2020 REU)
Sina Ghandi (Summer 2020 REU)
Lauren Howard (Summer 2019 REU)
Jin Suh (Summer 2019 REU)
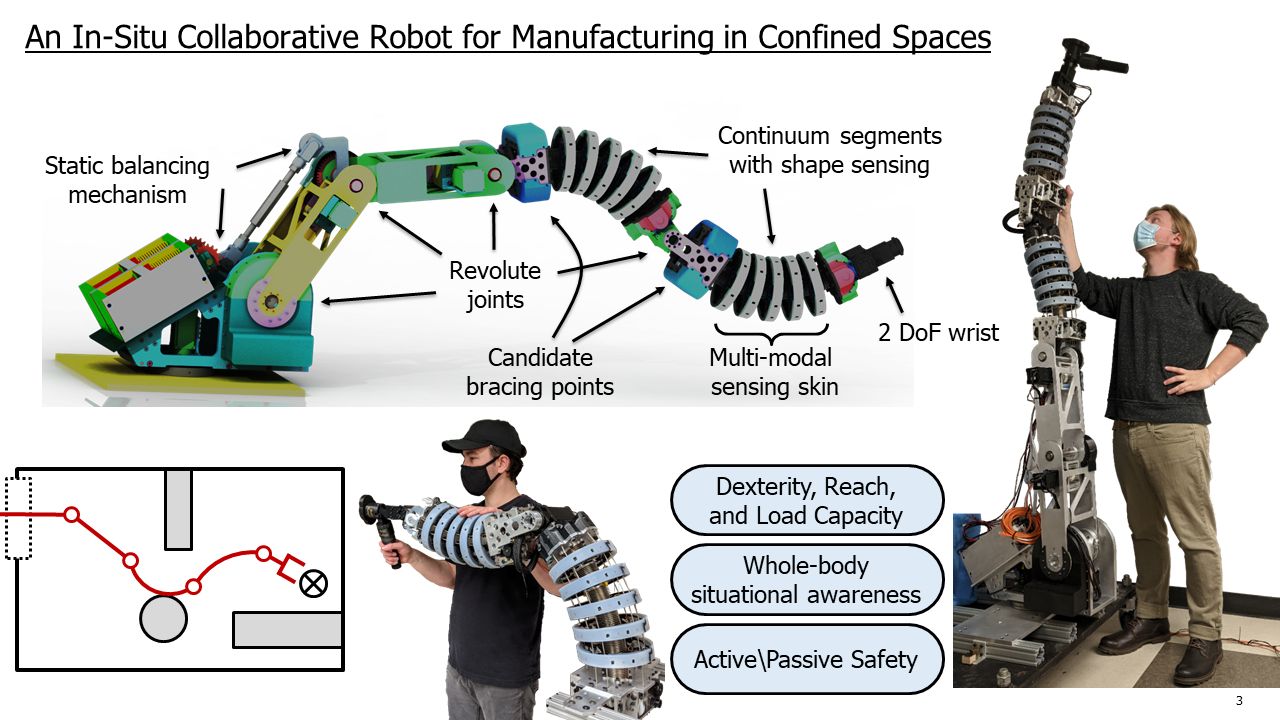
Many manufacturing operations require workers to perform operations in confined spaces, subjecting them to possible fatigue and injury from performing tedious tasks in non-ergonomic postures. Intelligent robotic assistants can facilitate safe and ergonomic reach into such spaces, while allowing human workers to remain physically present and in full control over delicate operations. The project will investigate the use of highly reconfigurable, in-situ, collaborative robots (ISCRs) with the enhanced perception and support-autonomy needed to allow a worker and a robot to safely share a common space and collaborate through physical interaction. Conventional robots cannot be used as ISCRs because they are bulky, special-purpose and difficult to program. This project's ISCRs are expected to reduce worker fatigue and musculoskeletal injuries, which are responsible for more than 34 percent of lost work days in the United States, and increase worker productivity. Their added intelligence is also expected to make the robots easier to use, by offering a human-friendly means of interaction. The research has potential applications in the aerospace industry, including the manufacture and service of the fuselage and wings, inspection and repair of hydraulic lines or fuel tanks and pipes, caulking, welding of structural joints and deburring.
This work to support effective human-robot collaboration in confined spaces makes three main technical contributions: 1) design and control strategies for ISCRs, 2) contact detection and location estimation and 3) simultaneous contact-force and navigation (SCAN) planning, so that a robot can use bracing to maneuver deep into a confined space. The ISCRs allow compliance and robustness to geometric uncertainty, reduced inertia, contact sensing and regulated force of interaction with the environment. This new design enables the exploration of real-time estimation for contact state detection, a screw-theoretic approach for constraint identification, and stiffness modeling. The research will also develop planners to achieve SCAN within a semi-structured environment with uncertainty and will use intentional contact to allow enable the robot to reach deep into confined spaces.
R. Natarajan, G.L.H Johnston, N. Simaan, M. Likhachev, H. Choset, "Torque-Limited Manipulation Planning through Contact by Interleaving Graph Search and Trajectory Optimization," 2023 IEEE International Conference on Robotics and Automation (ICRA). Accepted. [arXiv].
R. Natarajan, G.L.H. Johnston, N. Simaan, M. Likhachev, and H Choset, "Long-Horizon Torque-Limited Planning through Contact using Discrete Search and Continuous Optimization" in IROS 2023 Workshop on Leveraging Models for Contact-Rich Manipulation. Accepted for Spotlight Talk. [pdf]