|
The Vanderbilt Mechanical Engineering program that supports this workshop includes several core faculty members who have been conducting research in a wide area of robotics and its applications to healthcare. The workshop is unique in a sense that it demonstrates applications of the new exciting field of healthcare robotics in a wide range of use scenarios. The workshop includes talks by experts in the field of healthcare robotics and in-lab demonstrations of research platforms. Topics to be covered include the role of Mechanical Engineering in healthcare robotics, surgical applications and design of novel mechanical architectures including parallel robots and flexible snake-like robots; ongoing research on rehabilitation including prosthetics, artificial hands and legs; and intelligent control systems that use biological input signals intelligently to determine mental state of the user, attention, and frustration. Site: Olin Hall, 2400 Highland Avenue, Nashville, TN 37232
RED: Parallel Robots and Snake robots for surgery (Nabil Simaan, ARMA Lab), Room 407 Student group 1: Parallel Robots and Snake robots for surgery (N. Simaan, ARMA http://research.vuse.vanderbilt.edu/arma )
This demonstration and talk will introduce the students to parallel robots and snake robots. We will discuss advantages and applications of these robots for surgical assistance and healthcare. The demonstration will include two parts: 1 demonstration of a parallel robot system with a telemanipulation interface for ophthalmic and cochlear implant surgery and another demonstration of a snake robot. The demo will show movies of snakes performing palpation of mockup tumors followed by a demonstration on a snake robot that is sensitive to touch.
Student group 2: Intelligent Virtual Reality System for Automated Inference of Biological Signals (Nilanjan Sarkar, RASL http://robotics.vuse.vanderbilt.edu ).
The Robotics and Autonomous Systems Laboratory (RASL) conducts research in the areas of intelligent autonomous or semi-autonomous systems. Human-robot and human-computer interactions are research areas of current emphasis in RASL. We are developing new autonomous systems that can sense human emotion and act accordingly. The students will see a virtual reality-based system that can sense a person's eye gaze and physiological signals, infer his/her mental state (is the person paying attention, getting frustrated etc.) from these signals, and act adaptively in response to his/her affective states. The video of a robot that can act with a person in an emotion-sensitive manner will also be shown.
Student group 3: Assistive robots for disabled persons (Michael Goldfarb, CIM http://research.vuse.vanderbilt.edu/cim).
Student group 4: Haptics, Lasers, and Parallel Robots for Surgery (Robert Webster, MED http://research.vuse.vanderbilt.edu/MEDLab/index.htm ).
The Medical & Electromechanical Design Laboratory focuses on research to improve medicine through engineering. We will describe some of our projects involving robots for surgical applications, and provide 1) a hands-on demo of force feedback (haptic) devices: Falcons and/or haptic paddles, 2) a demonstration by a graduate student of a parallel robot for cochlear implant surgery, and 3) a demonstration by a graduate student of a laser scanning system designed to provide three dimensional "x-ray vision" for doctors during surgery.
Student group 5: Precision Pneumatic MRI Compatible Robotic Surgery (Eric Barth, http://www.vanderbilt.edu/dces/ )
Conventional robotic actuation, such as electromagnetic motors, are incompatible with an MRI’s imaging technology. This incompatibility currently makes intra-operative MRI guided robotic surgery and microsurgery unachievable. Potential solutions to this have been tried but with limited success. It is widely recognized in the engineering and scientific literature that pneumatic actuation is a viable solution for MRI compatible robotic surgery. Utilizing all plastic and other MRI compatible materials, pneumatically actuated robotic platforms have been demonstrated as presenting no image distortion. Through the utilization of air or other gas, pneumatic actuation presents no contamination issues. In addition, MRI compatible position and force sensing can be fully integrated through the use of fiber optics. The most significant barrier to the adoption of pneumatically actuated MRI compatible robotic platforms is their precision control. Pneumatic systems are highly nonlinear and require advanced control techniques. A viable pneumatic solution will require positioning precision better than 0.1 mm. Our lab has experimentally achieved pneumatic positioning precision better than 0.05 mm through the use of adaptive nonlinear control techniques. Precision motion and force control of pneumatic systems will allow the realization of a pneumatic robotic platform capable of fully exploiting the image resolution of an MRI machine in real-time.
Pictures from the event: Below are some pictures from the event. The images of minors have been intentionally blurred to protect their identity.
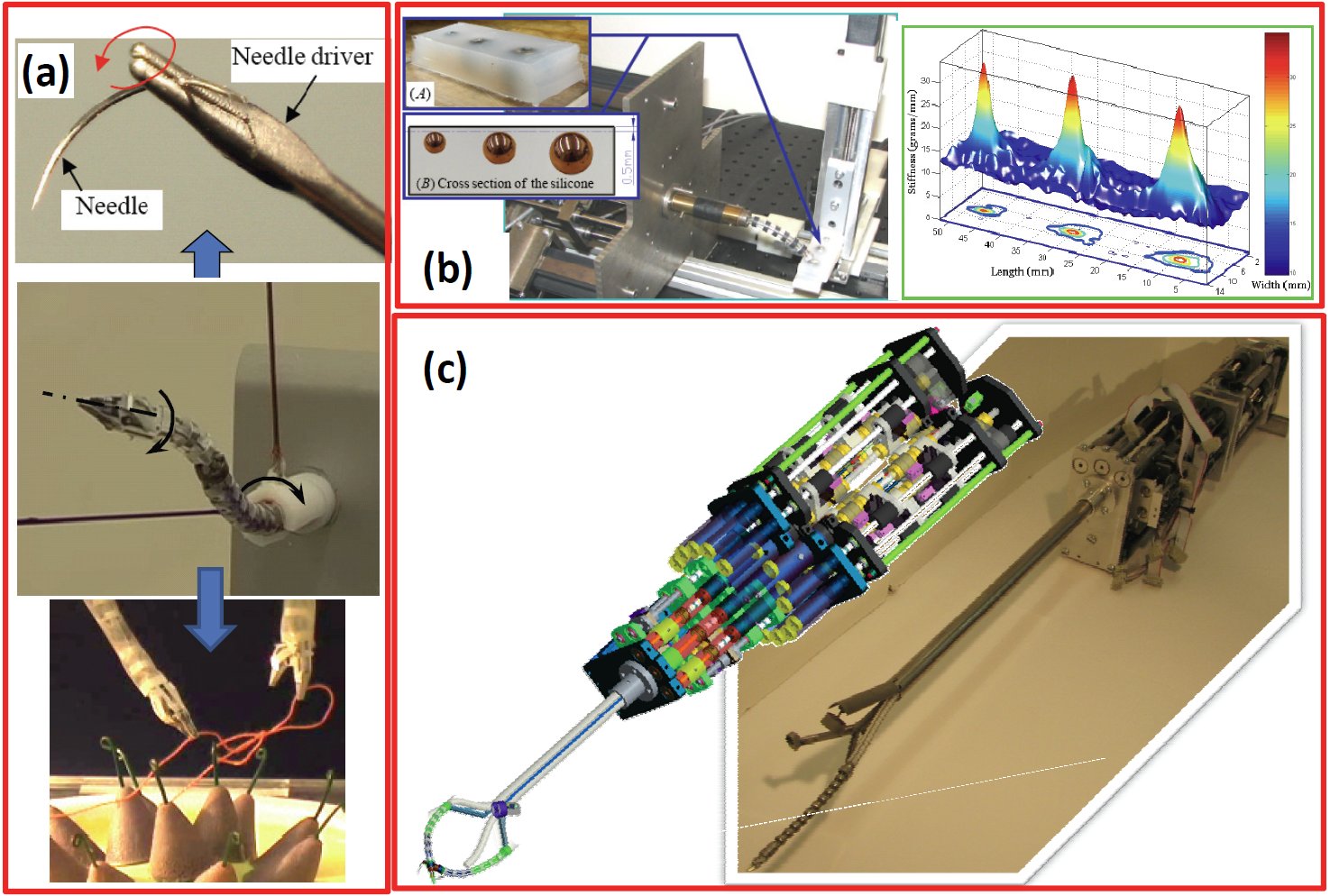
Nabil Simaan Associate Professor, Department of Mechanical Engineering, Vanderbilt University. Abstract: Natural Orifice Transluminal Endoscopic Surgery (NOTES) and Single Port Access (SPA) surgery are new surgical paradigms that promise to further reduce or eliminate the number of access incision ports compared to traditional minimally invasive surgery. While these new paradigms are being explored in a handful of academic centers, their progress and widespread use are hampered by many technological challenges that present research opportunities and challenges for the medical robotics and the surgical communities. This talk will explore some of these challenges and the necessities of their technological solutions.This talk will identify the challenges associated with addressing the needs of (NOTES) and Minimally Invasive Surgery (MIS) in confined spaces. The focus of the talk will be a discussion of design, control, and deployability considerations for these applications. We will specifically discuss our experience on the design of multi-backbone continuum robots for these applications while focusing on modeling frameworks for evaluating the dexterity of design alternatives, control strategies to mitigate backlash, and new methods for force sensing and feedback using joint-level (intrinsic) information and extrinsic information. Related Works: The following works are related to the topics to be discussed
Robotic Technologies for NOTES (a) Continuum robots performing rotation about their own backbone as a means for dexterous operation in confined spaces, (b) Continuum robots performing force sensing and stiffness imaging using intrinsic (joint-level) information only, (c) continuum robots used in a recently developed system for single port access surgery. This presentation is part of the ICRA'2010 Workshop: Snakes, Worms and Catheters: Continuum and Serpentine Robots for Minimally Invasive Surgery organized by Pierre Dupont and Mohsen Mahvash |