 The following is a description of active and past research activity at ARMA lab. Click on project titles for more detailed descriptions.
The following is a description of active and past research activity at ARMA lab. Click on project titles for more detailed descriptions.
Active projects:
 |
Simulation and Robotics for Accelerating Minimally Invasive |
 |
Emerging molecular, gene, and cell-based therapeutics targeting ocular diseases could prevent and potentially reverse cell degeneration and subsequent vision loss. However, reliable and safe delivery of these therapeutics into targeted ocular layers is an ongoing concern of the FDA, which may affect advancement of |
| |
In-Situ Collaborative Robotics in Confined Spaces Many industries require workers to operate in confined spaces presenting risks of worker fatigue and injury due to tedious tasks that often must be carried out in non-ergonomic postures. We are investigating ways in which robot design, control and path planning can be adapted to allow robots to collaborate with humans in confined spaces through physical collaborative manipulation and telemanipulation. |
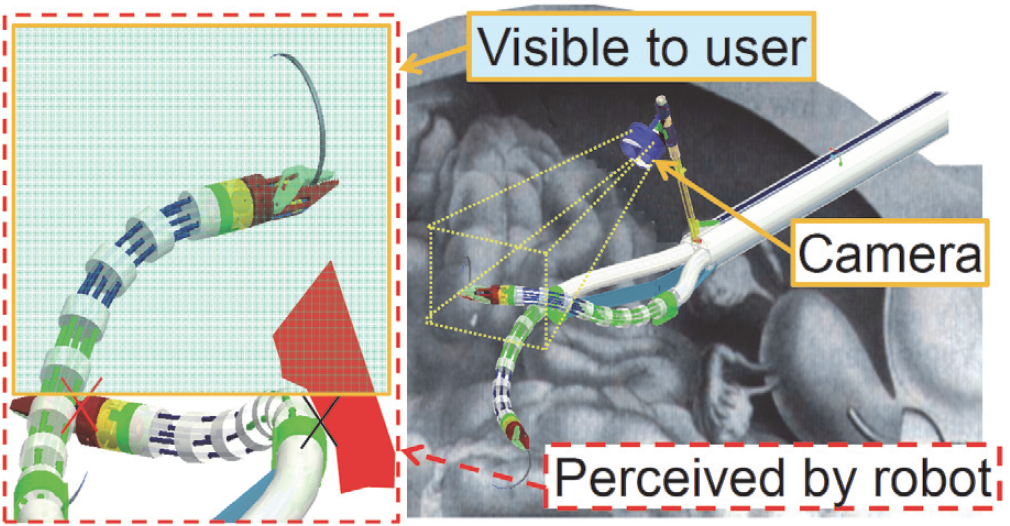 |
Complementary Situational Awareness for Human-Robot Partnerships This collaborative research aims to investigate methods for creating and using complementary situational awareness allowing robots to participate in helping human users in carrying out telemanipulation tasks. |
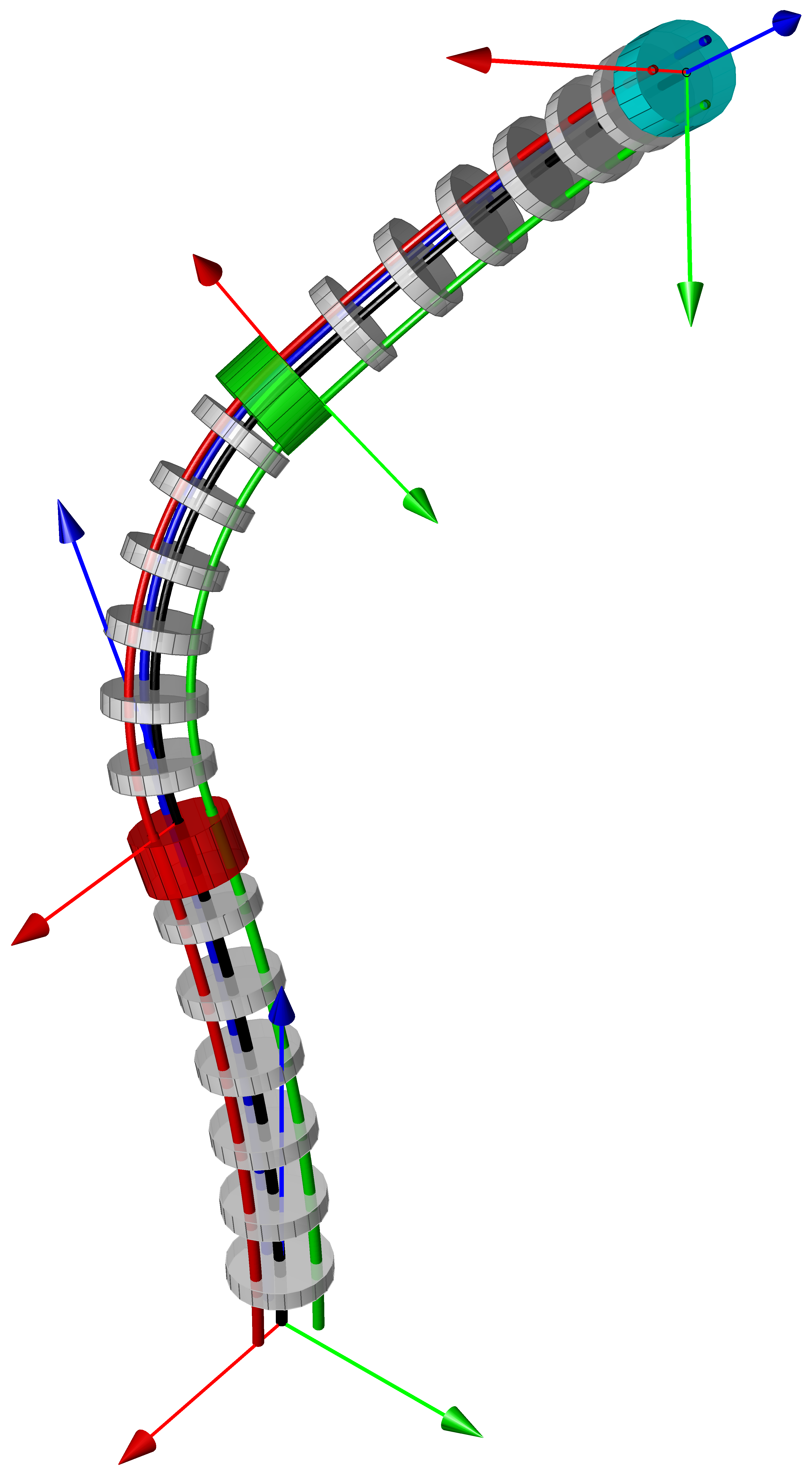 |
Continuum Robots for Multi-Scale Manipulation This project is designed to demonstrate a new class of continuum robots capable of multi-scale manipulation; that is, the ability to achieve large motion with millimetric precision and to achieve small motion with micrometer-scale precision. In contrast, existing robots are typically designed to function properly only at a single functional length scale. The envisioned class of robots will provide micro-precision while traversing macroscale sinuous pathways to access the operational site. Potential benefits include precise tissue reconstruction and complete surgical eradication of tumors. Such robots will also enable new abilities for micro-manufacturing, leading to greatly improved quality-control inspection methods for micro-fluidic and microelectromechanical devices mass-manufactured on large substrates. |
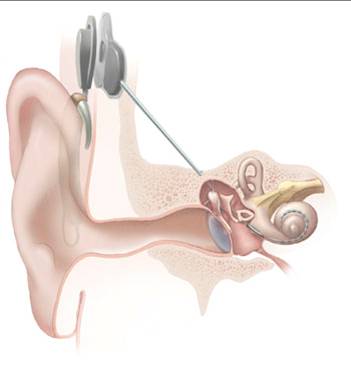 |
Robotic-assisted Cochlear Implant Surgery Cochlear implant surgery allows surgeons to restore partial hearing to patients suffering from severe hearing loss due to damaged neuroepithelial (hair) cells. During this surgery surgeons insert long, thin, and flimsy electrodes into the scala tympani inside cochlea. Our goal is to develop a robotic system to help surgeons achieve atraumatic cochlear implant surgery using novel steerable cochlear implant electrode arrays. The research focuses on path planning for robotic-assisted insertion of steerable electrode arrays into 3D cavities (scala tympani) using partial force feedback information. Insertion experiments in preliminary research are achieved using two Degrees of Freedom (DoF) robotic system and four DoF robotic system. For the 2 DoF system, one actuation is used for insertion, the other one is for the steering of the electrode array. In the 4 DoF system, besides steering the electrode array, in-plane movement and rotation are achieved. |
 |
Optical Coherence Tomography Guided Robot-Assisted Retinal Surgery This project uses real-time intra-ocular B-mode OCT technology to help guide robotic retinal surgery. Preliminary study about this project will enable potential ophthalmic interventions using assistive telemanipulation or semi-automated control. |
Completed projects:
 |
Robotic Transurethral Bladder Cancer Resection This research aims to improve minimally invasive surveillance and resection of bladder cancer. We are investigating the use of continuum robots for accurate resection and improved dexterity during TURBT (Trans-Urethral Resection of Bladder Tumors). We are investigating telemanipulation of continuum robots in constrained environments, force sensing, and control. |
 |
NSF Career: Intelligent Flexible Robots for Safe Manipulation of Anatomy Current medical robotics systems use non-intelligent surgical manipulators that place the entire burden on surgeons for safeguarding against damage to the anatomy. The emergence of new surgical paradigms, such as Natural Orifice Endoscopic Trans-luminal Surgery (NOTES), requires surgical robots that are capable of supporting safe interaction with the anatomy while accessing deep surgical sites through often long natural access pathways. This requires new types of robots capable of safeguarding against damage to the anatomy by acting as intelligent intervention and information gathering tools for assisting surgeons during increasingly complex procedures. The objective of this research is to provide the theoretical foundation for modeling and control of flexible robots for intelligent and safe interaction with the anatomy. Intelligence refers to the ability of these robots to gauge their force interaction with the anatomy, gather information about the anatomy, and act based on this information. |
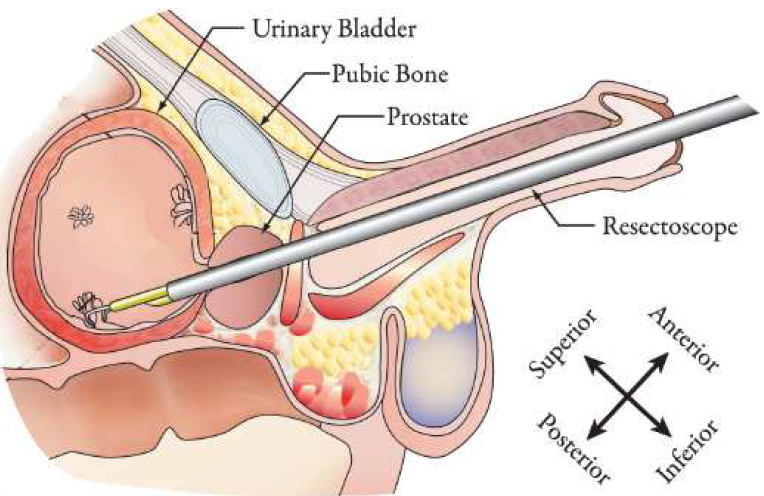 |
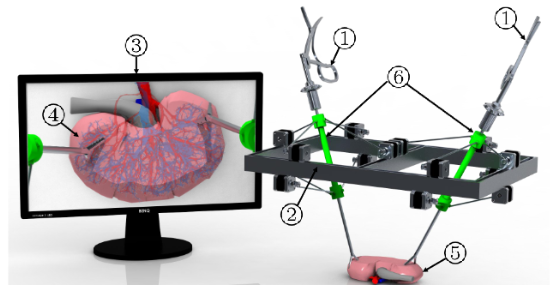
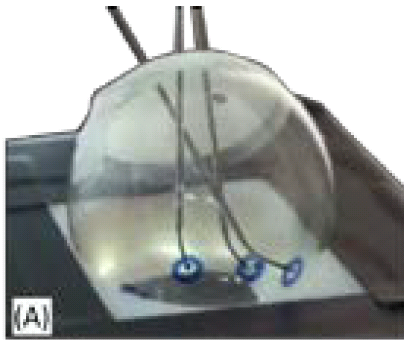
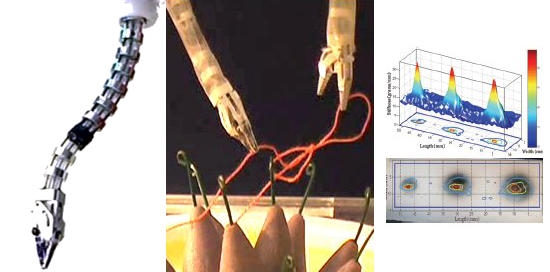
Image Guided In-Vivo Tooling Platform for Minimal Access Surgery Our project goals are to design insertable in-vivo robotic platform for single port surgery (less invasive surgery). This robotic platform is capable of bi-manual dexterous manipulation while providing stereo vision guidance. The system is also being designed for supporting several modalities of energy delivery, and sensory data collection. Figure 1 shows the current prototype of our system. The design allows this system to enter the abdominal cavity through a 15 mm trocar. When deployed, the system provides two highly dexterous arms for surgical intervention. A stereo camera module is used to automatically track instruments and for control feedback to compensate for deflection inaccuracies of the flexible continuum robot arms. |
 |
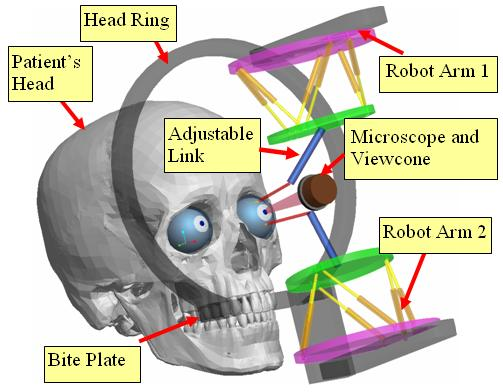
A system for Minimally Invasive Surgery of the Throat and Upper Airways
Minimally invasive surgery of the throat and upper airways is limited to procedures not involving suturing or complex tissue manipulation. As a result of instrument dexterity deficiencies, accurate tissue reconstruction subsequent to excision of tumors is not possible. Our goal is to overcome this limitation in order to reduce invasiveness and to ensure the preservation of normal vocal fold function subject to surgery. |
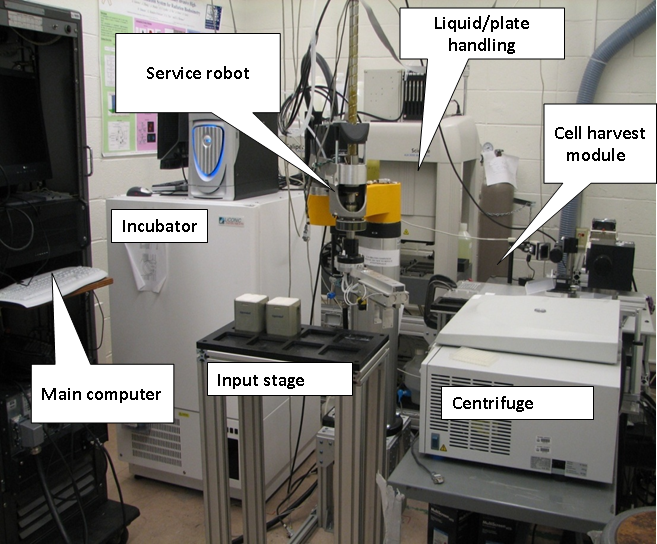 |
Automated Robotically-based High-throughput Radiation Biodosimetry Our goal is to develop a fully automated ultra-high throughput radiation biodosimetry workstation, using purpose-built robotics with a customized gripper and advanced automatic high-speed liquid handling system. This workstation is desired to be able to test a large scale radiological exposure on the order of 30,000 individuals per day. |
 |
Design of Precision Parallel Robots for Guaranteed Backlash Prevention The precision of parallel robots is limited by backlash in their joints. This project investigates algorithms for designing inexpensive planar parallel robots with a prescribed backlash-free workspace. The method of closing the backlash of the actuators uses preloaded flexible joints to replace the passive joints. These flexible joints may be made using standard joints with preloaded springs or by using preloaded flexure joints. Given a norm-bounded wrench acting on the robot, an algorithm is presented for determining the required preload for the flexible joints in order to guarantee backlash-free operation along a path or within a prescribed workspace. An investigation of the effects of the preloaded flexible joints on the stiffness is carried out using performance measures comparing the same robot with or without preloaded joints. These performance measures use an extended stiffness definition based on three non-collinear vertices on the moving platform. The paper presents simulations of the statics, stiffness and backlash prevention algorithm, followed by experimental validations. |
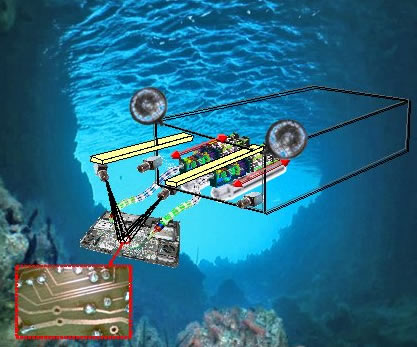 |
C.O.B.R.A.: Cooperative Bio-Inspired Robotic Manipulation Architecture This research aimed to design new deployable miro-manipulation systems for underwater assembly and sub-assembly of delicate instruments while providing frameworks for information fusion, force feedback, micro-manipulation, vision feedback and guidance, and disturbance rejection due to water movement. ARMA completed Phase I of this project, but due to defense agency budget cuts continued funding for this research activity was not possible. |