Project Title: NRI: INT: MANUFACTURING USA: COLLAB: In-Situ Collaborative Robotics in Confined Spaces
NSF Award Number: 1734461
Additional award details can be found at the NSF website.
This was a 4-year collaborative project with the Biorobotics Lab at Carnegie Mellon University. The Principal Investigators on this grant are Dr. Nabil Simaan (Vanderbilt University) and Dr. Howie Choset (Carnegie Mellon University).
Previous Personnel:
- Garrison Johnston, Ph.D. (2018-2024)
- Andrew Orekhov, Ph.D. (2017-2021)
- Colette Abah, Ph.D. (2017-2022)
Undergraduate Interns:
- Madison Veliky (Fall 2021 - Spring 2022 REU)
- Jeongwoo Seo (Summer 2020 REU)
- Sina Ghandi (Summer 2020 REU)
- Lauren Howard (Summer 2019 REU)
- Jin Suh (Summer 2019 REU)
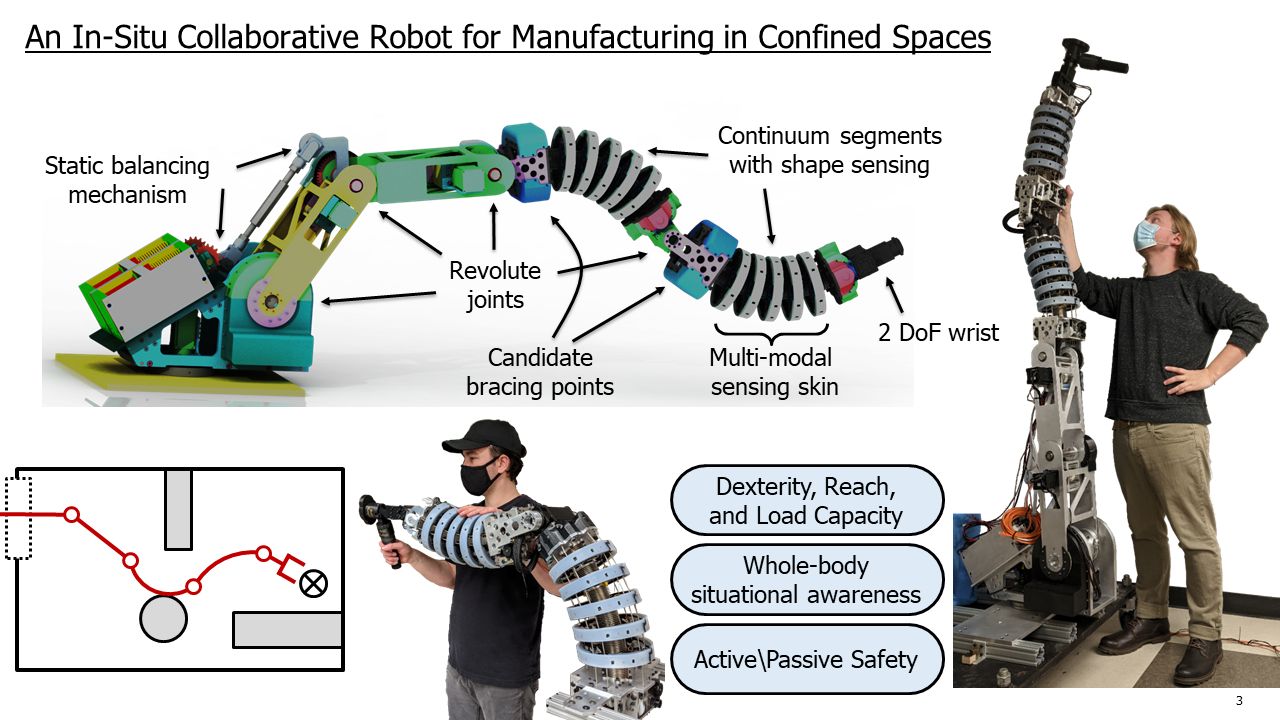
Many manufacturing operations require workers to perform operations in confined spaces, subjecting them to possible fatigue and injury from performing tedious tasks in non-ergonomic postures. Intelligent robotic assistants can facilitate safe and ergonomic reach into such spaces, while allowing human workers to remain physically present and in full control over delicate operations. The project will investigate the use of highly reconfigurable, in-situ, collaborative robots (ISCRs) with the enhanced perception and support-autonomy needed to allow a worker and a robot to safely share a common space and collaborate through physical interaction. Conventional robots cannot be used as ISCRs because they are bulky, special-purpose and difficult to program. This project's ISCRs are expected to reduce worker fatigue and musculoskeletal injuries, which are responsible for more than 34 percent of lost work days in the United States, and increase worker productivity. Their added intelligence is also expected to make the robots easier to use, by offering a human-friendly means of interaction. The research has potential applications in the aerospace industry, including the manufacture and service of the fuselage and wings, inspection and repair of hydraulic lines or fuel tanks and pipes, caulking, welding of structural joints and deburring.
This work to support effective human-robot collaboration in confined spaces makes three main technical contributions: 1) design and control strategies for ISCRs, 2) contact detection and location estimation and 3) simultaneous contact-force and navigation (SCAN) planning, so that a robot can use bracing to maneuver deep into a confined space. The ISCRs allow compliance and robustness to geometric uncertainty, reduced inertia, contact sensing and regulated force of interaction with the environment. This new design enables the exploration of real-time estimation for contact state detection, a screw-theoretic approach for constraint identification, and stiffness modeling. The research will also develop planners to achieve SCAN within a semi-structured environment with uncertainty and will use intentional contact to allow enable the robot to reach deep into confined spaces.
Publications
- G.L.H. Johnston, N. Shihora, and N. Simaan, "A Modal-Space Formulation for Momentum Observer Contact Estimation and Effects of Uncertainty for Continuum Robots," International Journal of Robotics Research. 2025;0(0). doi:10.1177/02783649251342823
- A.L. Orekhov, G.L.H. Johnston, Nabil Simaan. "Task and Configuration Space Compliance of Continuum Robots via Lie Group and Modal Shape Formulations," 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 2023, pp. 590-597, doi: 10.1109/IROS55552.2023.10341594. [arXiv]
- G. Del Giudice, G.L.H Johnston, N. Simaan, "Design Considerations for 3RRR Parallel Robots with Lightweight, Approximate Static-Balancing," Proceedings of the ASME 2023 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Volume 8: 47th Mechanisms and Robotics Conference (MR). Boston, Massachusetts, USA. August 20–23, 2023. V008T08A002. ASME. doi:10.1115/DETC2023-110947. [arXiv]
- G.L.H Johnston, A. L. Orekhov, N. Simaan, "Design Considerations and Robustness to Parameter Uncertainty in Wire-Wrapped Cam Mechanisms," ASME Journal of Mechanisms and Robotics. Jan. 2023. [video][arXiv]
- R. Natarajan, G.L.H Johnston, N. Simaan, M. Likhachev, H. Choset, "Torque-Limited Manipulation Planning through Contact by Interleaving Graph Search and Trajectory Optimization," 2023 IEEE International Conference on Robotics and Automation (ICRA). Accepted. [arXiv].
- C. Abah, A. L. Orekhov, G. L. H. Johnston, N. Simaan, "A Multi-Modal Sensor Array for Human-Robot Interaction and Confined Spaces Exploration Using Continuum Robots," IEEE Sensors Journal. Dec. 2021. [video]
- A. L. Orekhov, E. Z. Ahronovich, N. Simaan, "Lie Group Formulation and Sensitivity Analysis for Shape Sensing of Variable Curvature Continuum Robots with General String Encoder Routing" IEEE Transactions on Robotics. Jan. 2023 [video]
- A. L. Orekhov, N. Simaan, "Solving Cosserat Rod Models via Collocation and the Magnus Expansion," 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct. 2020. [arXiv]
- G. L. H. Johnston, A. L. Orekhov, N. Simaan, "Kinematic Modeling and Compliance Modulation of Redundant Manipulators Under Bracing Constraints," 2020 IEEE International Conference on Robotics and Automation (ICRA), May 2020. [arXiv]
- A. L. Orekhov and N. Simaan, “Directional Stiffness Modulation of Parallel Robots With Kinematic Redundancy and Variable Stiffness Joints,” Journal of Mechanisms and Robotics, vol. 11, p. 051003, Oct. 2019. [video]
- C. Abah, A. L. Orekhov, G. L. H. Johnston, P. Yin, H. Choset, and N. Simaan, “A Multi-modal Sensor Array for Safe Human-Robot Interaction and Mapping,” 2019 IEEE International Conference on Robotics and Automation (ICRA), May 2019. [video]
Workshop Presentations
- R. Natarajan, G.L.H. Johnston, N. Simaan, M. Likhachev, and H Choset, "Long-Horizon Torque-Limited Planning through Contact using Discrete Search and Continuous Optimization" in IROS 2023 Workshop on Leveraging Models for Contact-Rich Manipulation. Accepted for Spotlight Talk. [pdf]
- A. L. Orekhov, J. Seo, N. Simaan. "Kinematics and Shape Sensing of a Collaborative Continuum Robot," IROS 2020 workshop on "Application-Oriented Modelling and Control of Soft Robots," Nov. 2020. (2nd Place Poster Prize)
- A. L. Orekhov, G.L.H. Johnston, C. Abah, H. Choset, and N. Simaan, “Towards Collaborative Robots with Sensory Awareness: Preliminary Results Using Multi-Modal Sensing,” in ICRA 2019 workshop "Physical human-robot interaction: a design focus," May 2019. [video]
Awards
- First Place. 2021 ASME Student Mechanism and Robotics Design Competition (SMRDC). [submission pdf][certificate]