Project Description (1997 - 1999)
- This thesis deals with the development of a mini parallel robot for medical applications. The medical applications considered are manipulation of a laparoscopic/Arthroscopic camera in minimally-invasive surgeries. These applications require limited workspace. Consequently, the parallel robot architecture is suitable for these applications and provides a robot which is more compact than the usual serial robots.
- A comparison between different architectures for the same task is presented in this work with results obtained for dimensional synthesis. A working prototype of an RSPR3 parallel robot was dimensionally synthesized, built, and actuated in position control for validating the results of our design.
The design features a robot with a minimal number of singularities inside its workspace. - The prototype is currently being experimentally tested for knee arthroscopic surgery and as an integrated tool for registration and surgical assistance in TKR (Total Knee Replacement).
The RSPR3 Mini-Parallel Robot
- This manipulator consists of three identical kinematic chains connecting the base and the moving platform. Each chain contains a lower link rotating around a pivot perpendicular to the base platform and offset-placed from the center of the base. At the other end of the lower link, a prismatic actuator is attached by a spherical joint. The upper end of the prismatic actuator is connected to the moving platform by a revolute joint. The axes of the revolute joints constitute an equilateral triangle in the plane of the moving platform.
- The design process included singularity analysis of the architecture. This yielded a robot with a minimal number of singularities inside its workspace. One of the features of this robot is its capabilities to perform 90 degrees rotation about the vertical axis and to align one of the linear actuators with the plane of the moving platform without having parallel singularity, in which, the moving platform loses constraint (gains uncontrollable degrees of freedom). The rotation of 90 degrees about the vertical axis and the alignment of one of the prismatic actuators with the plane of moving platform is known in the literature [1-5] to cause parallel singularity in the Stewart-Gough 3-3 and 3-6 platforms.

Figure 1: The RSPR3 mini-parallel robot
Figure 2: The robot is performing random motions within its workspace
Figure 3: The robot is performing a homing process in which it rotates 90 degree
Figure 4: The robot closes the linear actuators until all limit switches are pressed
Further development
- The RSPR3 prototype is currently in a revision phase and adaptations for testing it as a medical assistant manipulating a camera in Arthroscopic knee surgery.
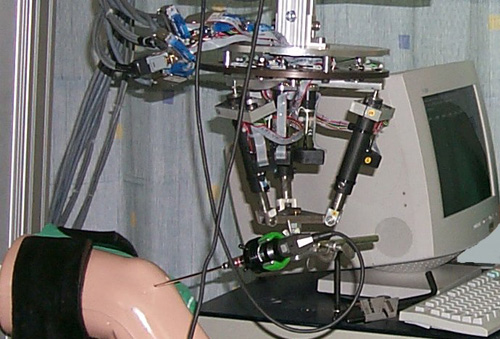
Figure 5: The RSPR3 manipulating an arthroscopic camera

Figure 6: The RSPR3 manipulating an arthroscopic camera during preliminary clinical setup evaluation 1999
Singularity analysis of composite serial in parallel robots using line geometry
My M.Sc. also focused on the optimal dimensional synthesis of parallel robots. Part of my work focused on using line geometry for analyzing singularities of parallel robots that have multiple solutions for their inverse kinematics problem. These robots are called Compopsite Serial In-Parallel robots (CISP) and they exhibit singularities in which the robot looses degrees of freedom (serial singularities) or looses rigidity (parallel singularities). In my IEEE TRO paper an exhaustive analsyis of parallel singularities for a family oif 15 parallel robots is derived using synthetic proofs based on projective line geometry and degeneracy realtions of line varieties. Figure 6 summarizes all the parallel singularities of these parallel robots.
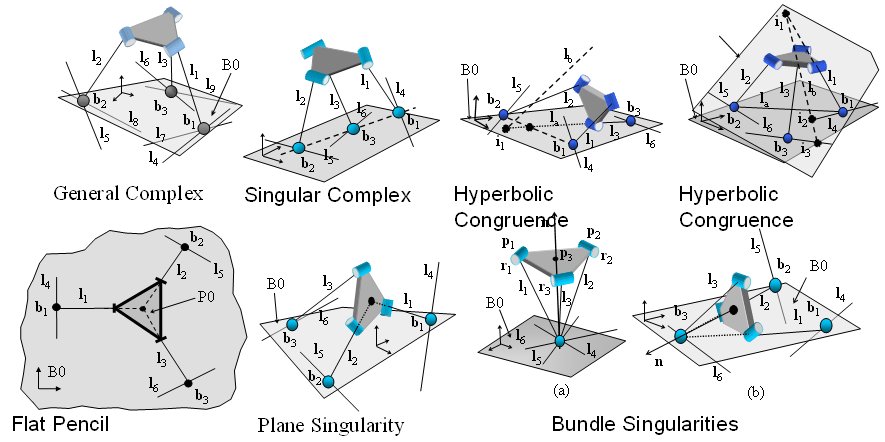
Figure 6: exhaustive singularity analsys for a family of 15 Composite Serial In-Parallel robots using Grassmann line geometry (see my IEEE TRO paper for details)
Acknowledgments
- We would like to express our thanks to Dr. Moshe Roffman and Dr. Beni Bernfeld of Carmel Hospital at Haifa for thier advise on the medical application and assistance in the preliminary experiments. This project was partially supported by the Fund for Promotion of Sponsored Research at the Technion.
References
- K. H. Hunt, “Structural Kinematics of In-Parallel-Actuated Robot-Arms,” ASME J. Mechanisms, Transmiss. Automat. Design, Vol. 105, pp. 705-712, 1983.
- E. F. Fichter, “A Stewart Platform-Based Manipulator: General Theory and Practical Construction.” Int. J. Robot. Res., Vol. 5, No. 2, pp. 157-182, 1986.
- J. P. Merlet, “Singular Configurations of Parallel Manipulators and Grassmann Geometry,” Int. J. Robot. Res., Vol. 8, No. 5, 1989.
- J. P. Merlet, “Parallel Manipulators, part 2: Singular configurations and Grassman geometry”. INRIA research Report No. 791, February 1988.
- R . Ben-Horin, Criteria for Analysis of Parallel Robots. Ph.D. dissertation, Technion, Israel, 1997.
Download the thesis (4.76 Mb in PDF format)