Nabil Simaan
Associate Professor, Department of Mechanical Engineering, Vanderbilt University.
Abstract:
Natural Orifice Transluminal Endoscopic Surgery (NOTES) and Single Port Access (SPA) surgery are new surgical paradigms that promise to further reduce or eliminate the number of access incision ports compared to traditional minimally invasive surgery. While these new paradigms are being explored in a handful of academic centers, their progress and widespread use are hampered by many technological challenges that present research opportunities and challenges for the medical robotics and the surgical communities.
This talk will explore some of these challenges and the necessities of their technological solutions.This talk will identify the challenges associated with addressing the needs of (NOTES) and Minimally Invasive Surgery (MIS) in confined spaces. The focus of the talk will be a discussion of design, control, and deployability considerations for these applications. We will specifically discuss our experience on the design of multi-backbone continuum robots for these applications while focusing on modeling frameworks for evaluating the dexterity of design alternatives, control strategies to mitigate backlash, and new methods for force sensing and feedback using joint-level (intrinsic) information and extrinsic information.
Related Works:
The following works are related to the topics to be discussed
- N. Simaan, "Snake-Like Units Using Flexible Backbones and Actuation Redundancy for Enhanced Miniaturization," in IEEE International Conference on Robotics and Automation Barcelona, Spain, 2005, pp. 3020-3028.
- N. Simaan, R. Taylor, and P. Flint, "High Dexterity Snake-like Robotic Slaves for Minimally Invasive Telesurgery of the Upper Airway," in MICCAI 2004 (7th International Conference on Medical Image Computing and Computer-Assisted Intervention), 2004, pp. 17-24.
- N. Simaan, R. Taylor, and P. Flint, "A Dexterous System for Laryngeal Surgery - Multi-Backbone Bending Snake-like Slaves for Teleoperated Dexterous Surgical Tool Manipulation," in IEEE International Conference on Robotics and Automation New Orleans, 2004, pp. 351-357.
- N. Simaan, R. Taylor, P. Flint, and A. Hillel, "Minimally Invasive Surgery of the Upper Airways: Addressing the Challenges of Dexterity Enhancement in Confined Spaces," in Surgical Robotics - History, Present and Future Applications. vol. Nova Science Publications, R. Faust, Ed., 2007261-280.
- K. Xu, R. Goldman, J. Ding, P. Allen, D. Fowler, and N. simaan, "Design and Deployment Animation of an Insertable Robotic Effector Platform for Single Port Access (SPA) Surgery," in IEEE/RSJ International Conference on Intelligent RObots and_Systems (IROS) St. Louis, 2009, pp. 5546-5552.
- J. Ding, K. Xu, R. Goldman, P. Allen, D. Fowler, and N. Simaan, "Design, Simulation and Evaluation of Kinematic Alternatives for Insertable Robotic Effectors Platforms in Single Port Access Surgery," in IEEE International Conference on Robotics and Automation Anchorage, Alaska, 2010, p. accepted for publication.
- K. Xu and N. Simaan, "Actuation Compensation for Flexible Surgical Snake-like Robots with Redundant Remote Actuation " in IEEE International Conference on Robotics and Automation, 2006, pp. 4148-4154.
- N. Simaan, K. Xu, A. Kapoor, P. Kazanzides, P. Flint, and R. Taylor, "Design and Integration of a Telerobotic System for Minimally Invasive Surgery of the Throat " International Journal of Robotics Research - special issue on Medical Robotics (special Issue on Medical Robotics), pp. Accepted for publication. First published online on published online on May 27th through IJRR OnlineFirst, 2009, 2009.
- K. Xu and N. Simaan, "An Investigation of the Intrinsic Force Sensing Capabilities of Continuum Robots," IEEE Transactions on Robotics, vol. 24, pp. 576-587, 2008.
- Bajo and N. Simaan, "Finding Lost Wrenches: Using Continuum Robots for Contact Detection and Estimation of Contact Location," in IEEE International Conference on Robotics and Automation (ICRA'2010) Anchorage, Alaska, 2010, p. accepted for publication.
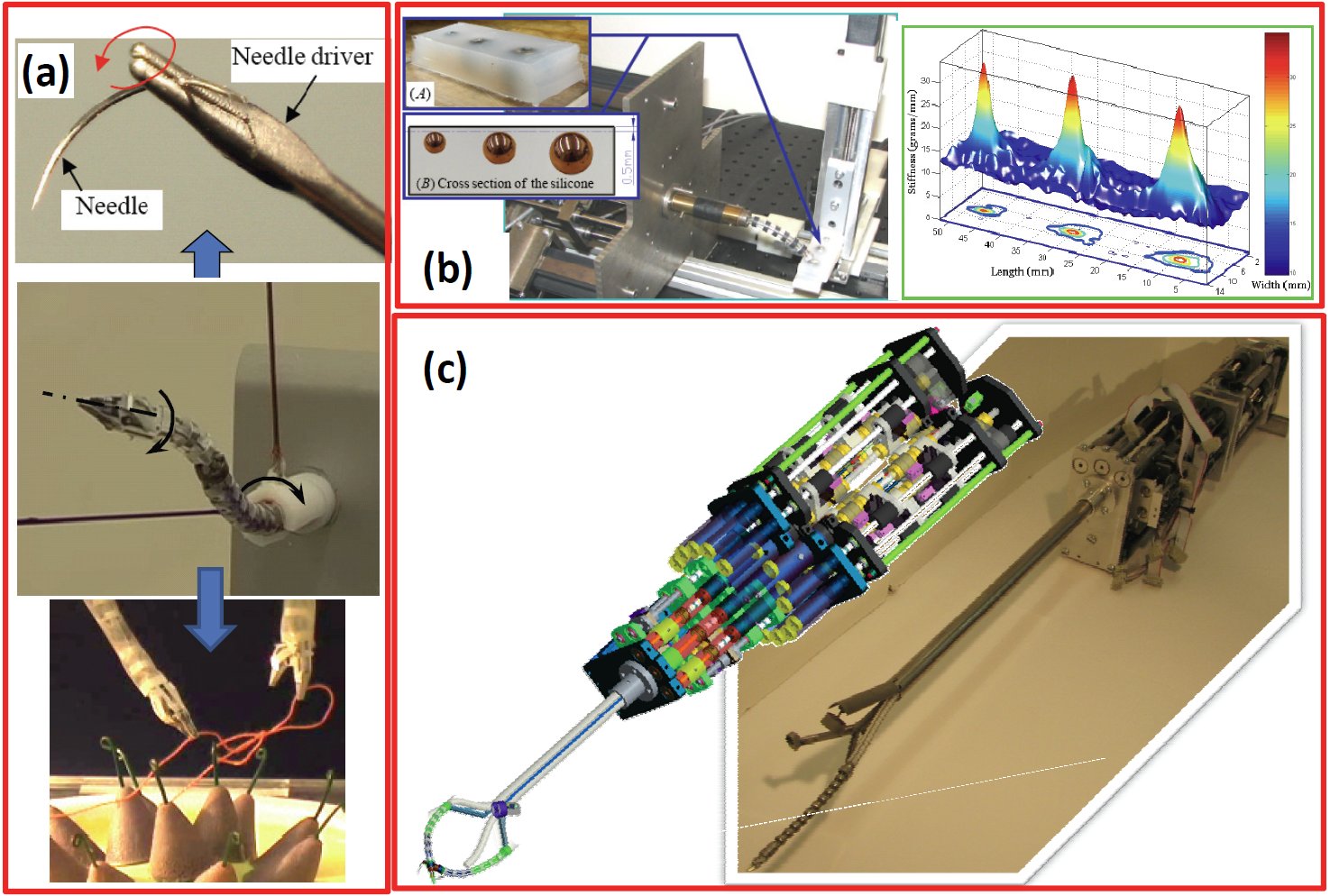
Robotic Technologies for NOTES (a) Continuum robots performing rotation about their own backbone as a means for dexterous operation in confined spaces, (b) Continuum robots performing force sensing and stiffness imaging using intrinsic (joint-level) information only, (c) continuum robots used in a recently developed system for single port access surgery.
This presentation is part of the ICRA'2010 Workshop: Snakes, Worms and Catheters: Continuum and Serpentine Robots for Minimally Invasive Surgery organized by Pierre Dupont and Mohsen Mahvash