|
In February 26 2009 the NSF has funded Dr. Simaan's Career grant. This 5-year grant aims at designing new algorithms and continuum robots for safe interaction with the anatomy. A description of the project is available HERE. February 25 2009: Kai Xu wins the China Scholarship Award: Chinese Government Award for Outstanding Self Financed Graduate Students Abroad. Congratulations Kai.
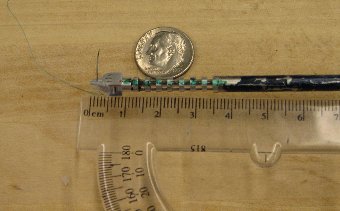
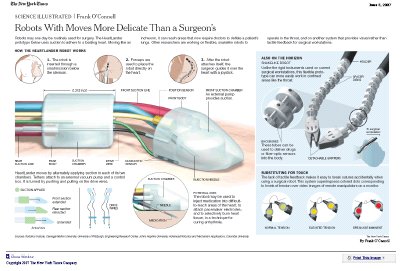
http://www.nytimes.com/imagepages/2007/06/05/science/05science_graphic.html February 25 2009: Jian Zhan recieves IEEE ICRA Travel award. Congratulations Jian. Professors Nabil Simaan (PI) and Professor Spiros Manolidis M.D. (Co-PI) received a 3-year NSF grant titled “Study of Robot-Assisted Cochlear Implant Insertion and Active-Bending Electrode Arrays”. This $330,000 grant will support research on novel robotic-assisted surgical approaches to cochlear implant surgery. The project will focus on surgical assistance using steerable electrode arrays that were developed at ARMA laboratory. The project will study control strategies and path planning for these under-actuated electrodes, design and construction of robotic electrode insertion devices, and evaluation of intracochlear trauma during electrode insertion. The eventual goal of this project is a smart table-top tele-robotic system that will be used to evaluate the different electrode insertion strategies on the reduction of intracochlear trauma. . This inter-disciplinary project is an ongoing collaboration between ARMA laboratory and Dr. Spiros Manolidis (an Associate Professor of Neurological Surgery and the Director of Otology & Skull Base Surgery at Columbia University). Dr. Manolidis is a Co-PI responsible for overseeing the clinical aspects of this project. In addition, Dr. John T. Roland of the department of Otolaryngology and Neurosurgery at New York University School of Medicine is serving as an additional clinical consultant for this project. The preliminary work for this project was carried out at ARMA with the participation of Ph.D. students Jian Zhang and Kai Xu. Dr. Jienan (Jayson) Ding joined ARMA lab in June 2008 as a post-doctoral scientist with a primary appointmet in the department of Surgery. Dr. Ding recieved his Ph.D. from Tianjin Universiuty in 2008. His research is focused on the NIH-funded project titled "Image Guided In Vivo Tooling Platform for Minimal Access Surgery". See the following link for description of the project. October 2006: Jian Zhang wins best student paper award for clinical application paper in MICCAI'2002Jian Zhang, (Ph.D. student at ARMA – Advanced Robotics and Mechanisms Applications laboratory) won the Best Student Paper award for Clinical Applications category in MICCAI2006. MICCAI (Medical Image Computing and Computer-Assisted Intervention) is the premier international medical robotics conference held annually. 578 papers were submitted to MICCAI out of which only 39 were accepted for a full length presentation and 139 were accepted for poster presentation. Jian’s paper was one of the 39 papers accepted for full length presentation. About 80 international papers participated in the best student paper competitions based on reviewer’s nominations and 5 papers were given awards in 5 categories including the clinical applications category that Jian won. The paper is titled "A Pilot Study of Robot-Assisted Cochlear Implant Surgery Using Steerable Electrode Arrays" by Jian Zhang, Kai Xu, Dr. Nabil Simaan and Dr. Spiros Manolidis is an ongoing collaboration between ARMA and the medical school (Dr. Spiros Manolidis is at the department of Otolaryngology- Head & Neck Surgery at Columbia University). Welcome Youhua Dr. Youhua Chen joined ARMA lab on March 15 2008 as a post-doctoral scientist. His research is focused on the design, control, and automation scheduling of an autonomous automation system for high-throughput biodosimetry. See the Biodosimetry Project description for detail.
Second integration experiments of the System for Minimally Insvasive Surgery of the upper Airways Kai Xu1, Wei Wei1, Ankur Kapoor2, Peter Kazanzides2, Nabil Simaan1, Russell Taylor2, Paul Flint3 1 ARMA - Columbia University In June 2006 we conducted the second integration experiments using a new 5 DoF Modular Snake Like-Device for throat surgery. This work is being done in collaboration with Johns Hopkins ERC-CISST and Johns Hopkins Otlaryngology-Head & Neck Surgery. Click on the picture below to watch the most recent movie of this snake-like device. It may take few moments to download, but it is worth it :-) . The experiments were conducted by Kai Xu and Wei Wei from ARMA and Ankr Kapoor from ERC-CISST. Dr. Alessio Salerno left ARMA in December 15, 2007. He left ARMA to join the Canadian Space Agency where he has joined their space-robotics effort. ARMA members express their gratitude for his hard work during the period he served as a post-doc in the lab. Below is a picture of Alessio's farewell party. Good luck Alessio :-)
7 DOF LARS robot with the 2-stage snake robot and a micro-surgical gripper
Siemens Science Day 2007
Lab members Wei Wei and Kai Xu participated as instructors in Columbia University's collaborative Siemens Science Day. Columbia hosted more than 1300 students and parents with workshops promoting math and science education. The ARMA Lab demonstrated surgical robotics by allowing the students to practice in a mock robotic surgical setup. Below, Wei Wei looks on as a student attemps a robotic maneuver. Columbia News Article: Siemens Science Day, October 24, 2007
The Advanced Robotics and Mechanism Applications Laboratory joined the Department of Mechanical Engineering at Vanderbilt University in the Fall of 2010. The laboratory is now located in Olin Hall, fourth floor, room 407. We have got windows! :-)
Professors Nabil Simaan (ME Department) and Peter Allen (CS Department) recently recieved an NIH grant together with Dennis Fowler. This $1.2M 3-year NIH grant is titled “Image Guided In Vivo Tooling Platform for Minimal Access Surgery”.The goal of the grant is to support research on novel image-guidded robotic-assisted surgical approaches to Less Invasive Surgery (LIS). This research project will study the design, telemanipulation control, image-guidasnce, and the efficacy of of novel flexible snake-like robots for single-port surgery. The preliminary work for this project was carried out at ARMA with the participation of Ph.D. student Kai Xu. From June 17th to 19th, Prof. Simaan and Ph.D student Kai Xu attended the ERC-CISST NSF Site Visit at Johns Hopkins University where they presented the ongoing development of their prototype of the dexterous robot for throat surgery.
|



 On December 20-23rd, 2005, Kai Xu visited the ERC-CISST at Johns Hopkins University where he conducted integration experiments together with
On December 20-23rd, 2005, Kai Xu visited the ERC-CISST at Johns Hopkins University where he conducted integration experiments together with