 On December 20-23rd, 2005, Kai Xu visited the ERC-CISST at Johns Hopkins University where he conducted integration experiments together with Ankur Kapoor and Professor R. Taylor. Integration of our first prototype of the snake-like robot with a detachable parallel tip and a gripper together with a 6 DoF LARS robot and a DaVinci master console was successful in demonstrating basic suturing capabilities. Below you can see some updated pictures of the system. A major part of the integration was carried by Ankur Kapoor who programmed the DaVinci master console.
On December 20-23rd, 2005, Kai Xu visited the ERC-CISST at Johns Hopkins University where he conducted integration experiments together with Ankur Kapoor and Professor R. Taylor. Integration of our first prototype of the snake-like robot with a detachable parallel tip and a gripper together with a 6 DoF LARS robot and a DaVinci master console was successful in demonstrating basic suturing capabilities. Below you can see some updated pictures of the system. A major part of the integration was carried by Ankur Kapoor who programmed the DaVinci master console.
7 DOF LARS robot with the 2-stage snake robot and a micro-surgical gripper

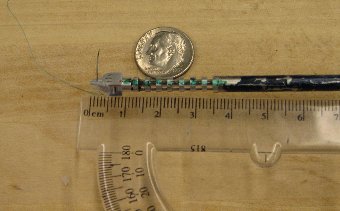
Micro-surgical gripper and a parallel micro-robot installed on the snake-robot
Kai Xu at master console (Also check CISST-web page for possible pictures/movies and Ankur Kapoor web page)