This page describes some of our activity within an NSF-funded project from 2006-2009 and work subsequently sponsored by Cochlear Ltd. from 2010 to the present. Our research focus is still on cochlear implant surgery and we are working on clinically deployable systems that use the algorithms developed during this research.
Active Personnel:
- Jason Pile 2010-present
- Sam Bhattacharyya 2008
- Jian Zhang 2006-2009
- Wei Wei 2006-2009
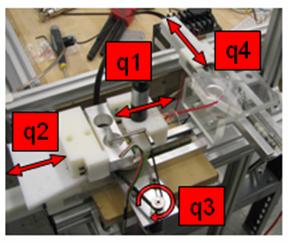
Cochlear implant surgery allows surgeons to restore partial hearing to patients suffering from severe hearing loss due to damaged neuroepithelial (hair) cells. During this surgery surgeons insert long, thin, and flimsy electrodes into the scala tympani inside cochlea. Our goal is to develop a robotic system to help surgeons achieve atraumatic cochlear implant surgery using novel steerable cochlear implant electrode arrays. The research focuses on path planning for robotic-assisted insertion of steerable electrode arrays into 3D cavities (scala tympani) using partial force feedback information. An example of an early experimental system used for testing some of our insertion path planning algorithms is shown in the following figure.
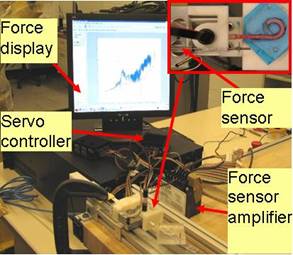
Experimental setup used to evaluate steerable electrode arrays for cochlear implant surgery
Overview of th e Robotic-Assisted Cochlear Implant Surgery System
The above figure shows an overview of the robotic-assisted cochlear implant surgery system using steerable electrode arrays. Surgeons insert the electrode array by controlling the parallel robot/insertion module through the master with force feedback. An online insertion force reading will be displayed on screen for reference.
The following figure shows the design of a scaled up (3:1) steerable electrode array with actuation strand inside. Upon pulling, it will bend into the desired shape that best approximates the shape of the scala tympani during the insertion process. In the figure, there are different bending shapes of the same steerable electrode array.
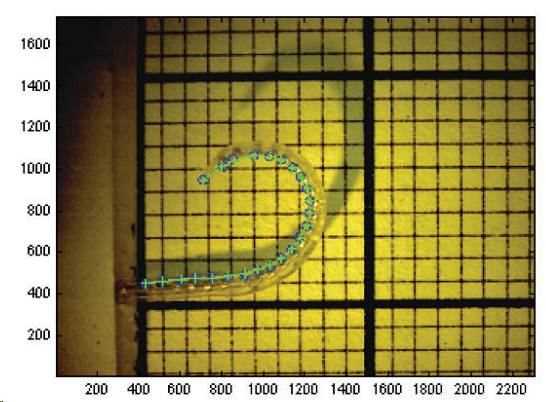
The bending shape of the steerable electrode array is calibrated after fabrication shown in the following figures. Once the characteristics of the electrode array are determined, the bending of the steerable electrode array is controlled by one of the actuation unit.

We also fabricated scaled up (3:1) planar and 3D scala tympani model based on literatures. Its high precision substitutes real cadavers for experiments.
Insertion experiments in preliminary research are achieved using two Degrees of Freedom (DoF) robotic system and four DoF robotic system. For the 2 DoF system, one actuation is used for insertion, the other one is for the steering of the electrode array. In the 4 DoF system, besides steering the electrode array, in-plane movement and rotation are achieved.

4 DoF insertion simulation video
The following video shows the insertion simulation process with optimal path planning for the 4 DoF robot. Notice the bending shape of implant changes according to the curve of the cochlea.
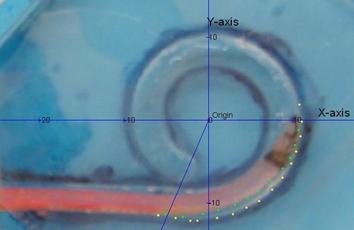
2 DoF steerable insertions in 3D scala tympani model
This video is a comparison of insertion process with steerable and non-steerable implant. The bottom one is using a steerable implant. The top one is using the same implant without steering. Notice the buckling of the electrode when it is inserted without steering it.
The results show that an obvious force decrease in observed in planar scala tympani model using 2 DoF system (steerable electrode array). This is due to the increased distance between steerable electrode array and scala tympani external wall by steering the electrode.
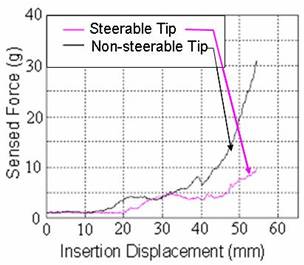
The following figure shows different experiment conditions and force reading results. It’s obvious from the figure that using steerable electrode array (2 DoF) can reduce 59.6% of the insertion force. Using 4 DoF system can further reduce 31.8% of the insertion force.
DoF = Degrees of Freedom ST = Scala Tympani
Our current research efforts focus on developing tools and algorithms for the insertion of clinically available cochlear implant systems. We are focus on the Contour Advanced periomodiloar electrode array (PEA) from Cochlear Ltd. This type of electrode is actuated through the removal of an embedded stylet in a technique called Advance Off Stylet (AOS). Our work on this project began with the kinematic modelling of the PEA's to examine their variability and repeatability under actuation. From this data, insertion trajectories were simulated with the optimization objective of minimizing intra-cochlear contact between the PEA and the scala tympani.
Kinematic model comparison with production implant under actuation.
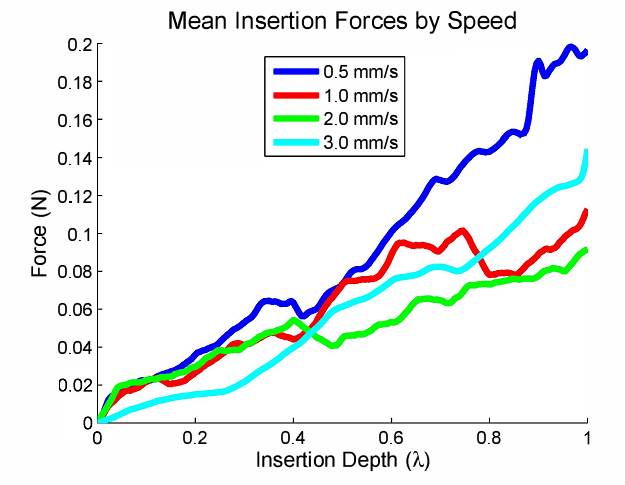
Our parallel robot insertion system has been used to characterize insertion forces in cadaveric specimens uder constant insertion speeds. We use this data to generate baseline expected insertion force ranges for control and failure detection.
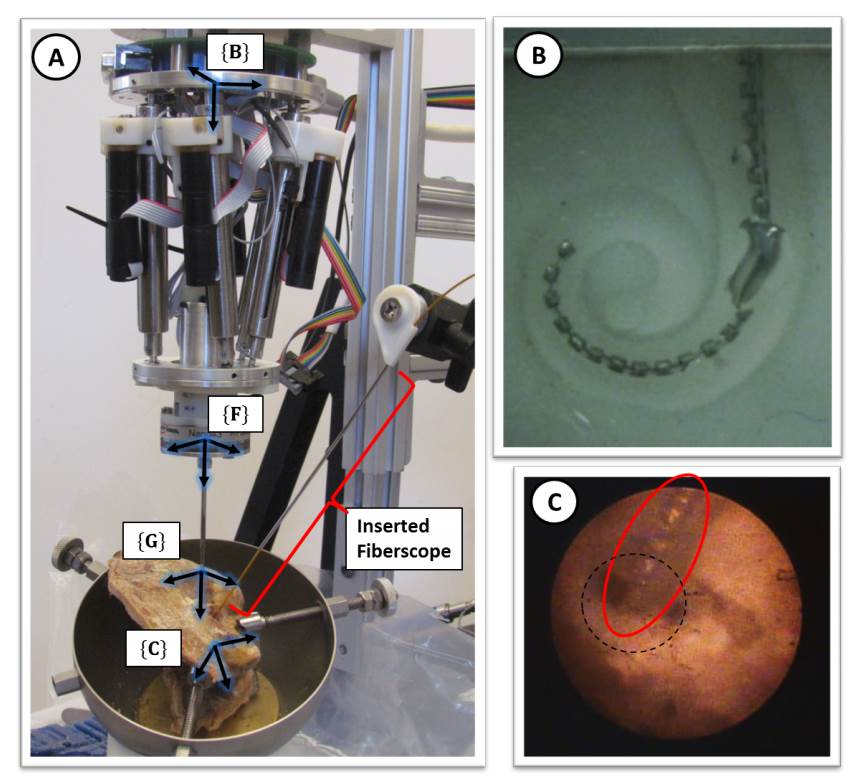
Robotic insertion: (A) System set for insertion in temporal bone specimen (B) view of insertion in a phantom model (C) Fiberscope view of PEA entering the cochlea during robotic insertion.
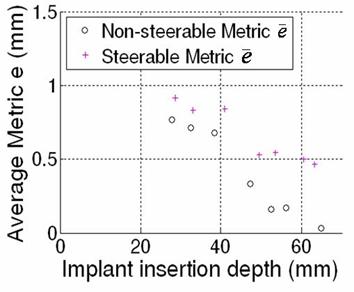
Average insertion forces in cadaveric cochlea insertions at controlled speeds
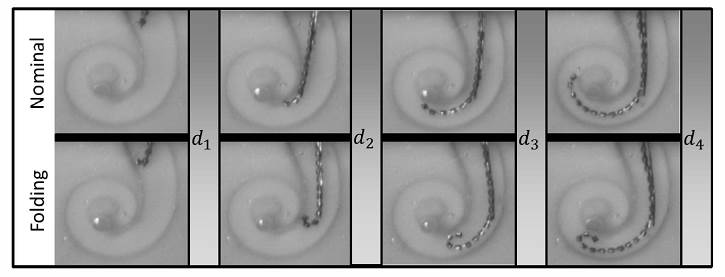
Using a combination of insertion forces and robot trajectory data, we have demonstrated the detection of intra-cochlear electrode bucking with accuracy of approximately 90%. This was achieved through the use of Support Vector Machine algorithms.
Example of intra-cochlear buckling
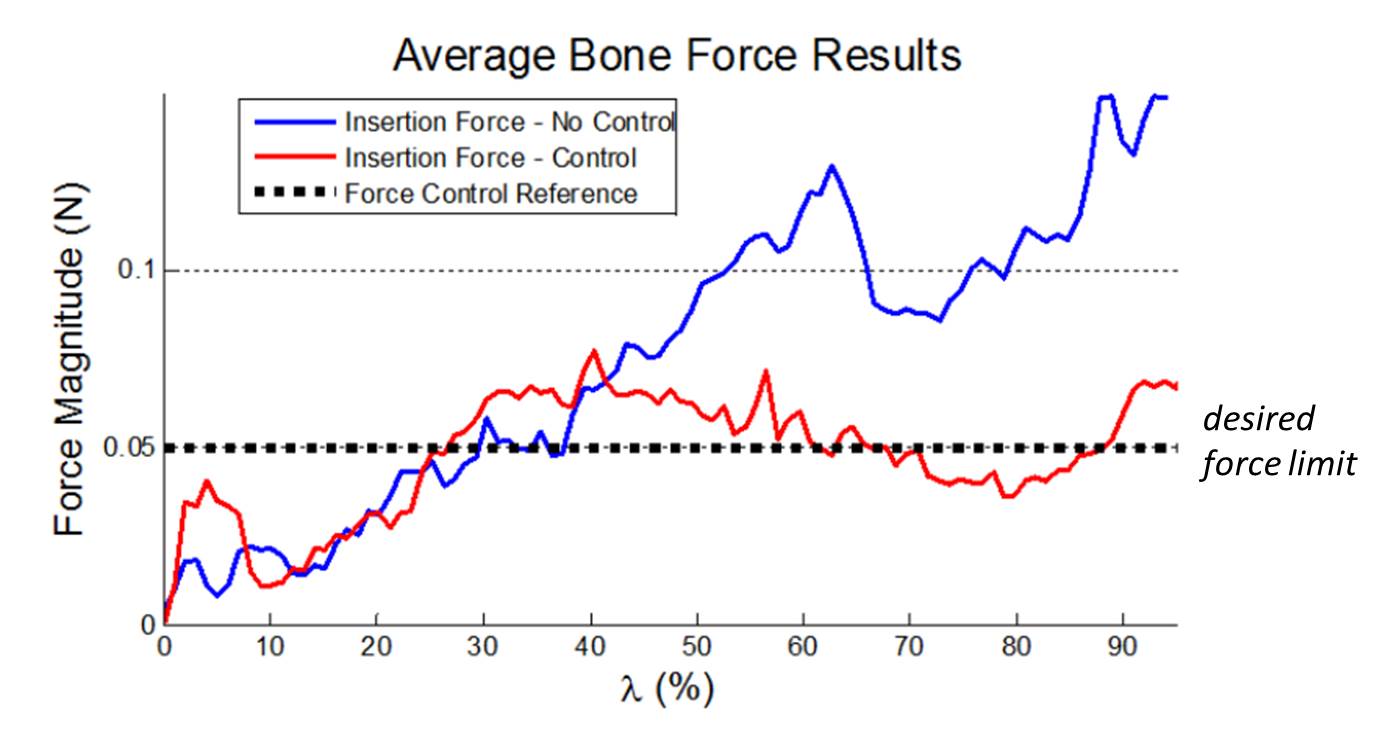
By incorporating hybrid force / position admittance control into our robotic system we have demonstrated in cadaveric specimens that rising forces in the deeper parts of the insertion process can be reduced to help mitigate the risk of trauma.
Improvement in insertion force magnitude through hybrid force control
Our continuing efforts focus on adding intelligent control to automated insertion with tools and processes compatible with current implantation procedures.
Publications
- Pile, J., Simaan, N. "Characterization of Friction and Speed Effects and Methods for Detection of Cochlear Implant Electrode Tip Fold-over," IEEE International Conference on Robotics and Automation (ICRA’2013), 2013
- Pile, J., Cheung, M., Zhang, J., Simaan, N. "Algorithms and Design Considerations for Robot Assisted Insertion of Perimodiolar Electrode Arrays," IEEE International Conference on Robotics and Automation (ICRA’2011), 2011
- Zhang, J., Bhattacharyya, S., Simaan, N., “Model and Parameter Identification of Friction During Robotic Insertion of Cochlear-Implant Electrode Arrays,” IEEE International Conference on Robotics and Automation (ICRA’2009), pp. 3859-3864, 2009.
- Zhang, J., Wei, W., Roland, J., Manolidis, S., Simaan, N., “Optimal Path Planning for Robotic Insertion of Steerable Electrode Arrays in Cochlear Implant Surgery”, in ASME Journal on Medical Devices, Vol 3., No. 1, pp. 011001, 2009.
- Zhang, J., Wei, W., Roland, J., Manolidis, S., Simaan, N., “Path Planning and Workspace Determination for Robot-Assisted Insertion of Steerable Electrode Arrays for Cochlear Implant Surgery,” MICCAI’2008, the 11th International Conference on Medical Image Computing and Computer Assisted Intervention , pp. 692-700, 2008.
- Zhang, J., Xu, K., Simaan, N., “A Pilot Study of Robot-Assisted Cochlear Implant Surgery Using Steerable Electrode Arrays,” MICCAI’ 2006 International Conference on Medical Image Computing and Computer-Assisted Intervention, Copenhagen, Sweden, pp. 33-40, 2006.
Collaborators
- M.D. George B. Wanna
- M.D. Robert Labadie
- M.D. Spiros Manolidis
- M.D. J. Thomas Roland, Jr.
Acknowledgement
This project was funded by the National Science Foundation through grant ##0651649 and by Columbia University internal funds (2005-2010).
Current research is funded by Cochlear Ltd.
Robot Assisted Cochlear Implant Surgery |