This project has been completed in August 2010.
Active Personnel:
- Youhua Chen (Post Doc, starting 3/15/2008)
- Alessio Salerno (Post-doc 2005-2007)
- Anubha Bhatla ( MRL ) (2005-2008)
- Honglian Wang ( MRL )
- Jian Zhang
This project is an ongoing collaboration between RARAF and the Mechanical Engineering Departmet (ARMA and MRL) on an NIH funded project (Principal Investigator David Brenner) .
Our goal is to develop a fully automated ultra-high throughput radiation biodosimetry workstation, using purpose-built robotics with customized gripper and advanced automatic high-speed liquid handling system. This workstaion is desired to be able to test a large scale radiological exposure on the order of 30,000 individuals per day.
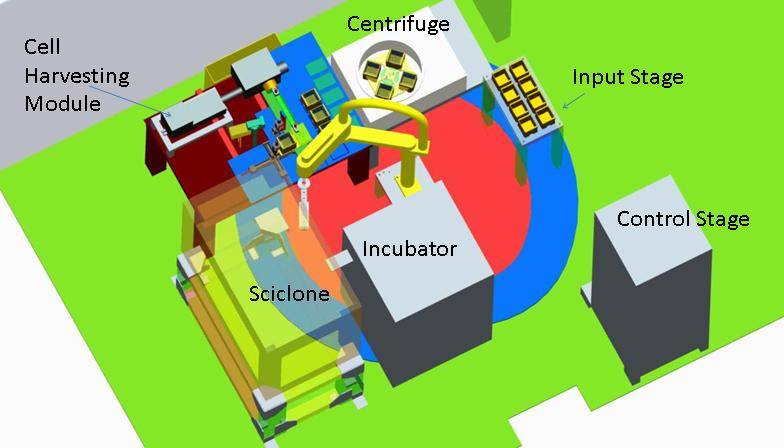
Figure 1: An Overview of the High Throughput Workstation
A key facet of the system will be that each individual¡¯s whole blood sample will be split into two, with one of the two split samples being irradiated to a dose of 1.8 Gy, before being analyzed. Two lymphocyte samples for the same person will be taken from the whole blood by centrifugation. This will allow a positive control for each individual, providing an internal calibration to take into account inter-individual variability in radiosensitivity.
Our Specific Aims, which will run in parallel throughout the project, are
1) Product development/System integration
2) The optimization/calibration/testing of biological protocols.
Current work has mainly focused on customized robot gripper design, multi-capillary centrfuge bucket design, centrifuge programming, imaging, laser cutting stage design, robot path planning, and making liquid-handeling protocol for the samples.
Figure 2 shows a working prototype of our Phase I system. This system is capable of handeling 6000 samples/day without human intervention.
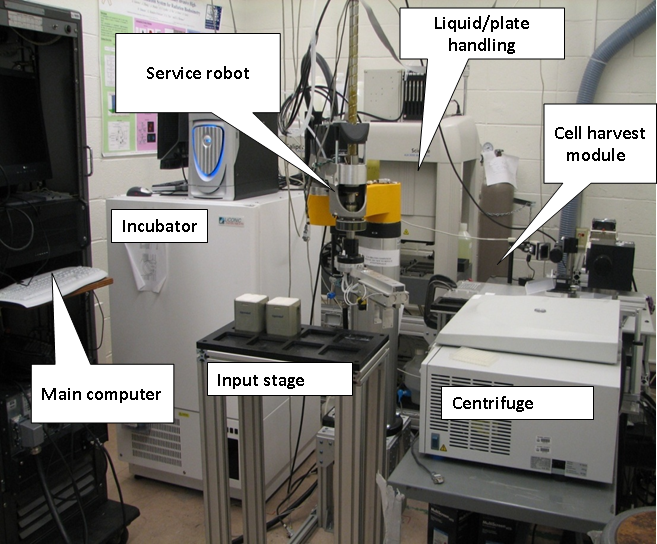
Figure 2: Phase I prototye system capable of handeling 6000 samples/day
Publications
-
Guy Garty; Youhua Chen; Alessio Salerno; Helen Turner; Jian Zhang; Oleksandra V Lyulko; Yanping Xu; Hongliang Wang; Nabil Simaan; Gerhard Randers-Pehrson; Lawrence Yao; Sally A Amundson; David J Brenner “The RABiT: A Rapid Automated Biodosimetry Tool for radiological triage,” Accepted for publication, Health Physics Journal, 2009.
-
Chen, Y., Zhang, J., Wang, H., Garty, G., Xu, Y., Lyulko, O., Turner, H., Randers-Pehrson, G., Simaan, N., Yao, L., Brenner, D., “Rabit – Rapid Automated Biodosimetry Tool For High Throughput Radiological Triage,” accepted for publication in ASME 2009 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2009, 2009.
-
Salerno, A., Zhang, J., Bhatla, A., , Lyulko, O. V., Nie, J., Dutta, A., Garty, G., Simaan, N., Randers-Pehrson, G., Yao Y-L., Brenner, D. J., “Design Considerations for a Minimally Invasive High-Throughput Automation System for Radiation Biodosimetry,” IEEE Conference on Automation Science and Engineering, Scottsdale, Arizona, USA, pp. 846-852, 2007.
- David Brenner
- Lawrence Yao
- Giuseppe Schettino
- Guy Garty
- Gerhard Randers-Pehrson