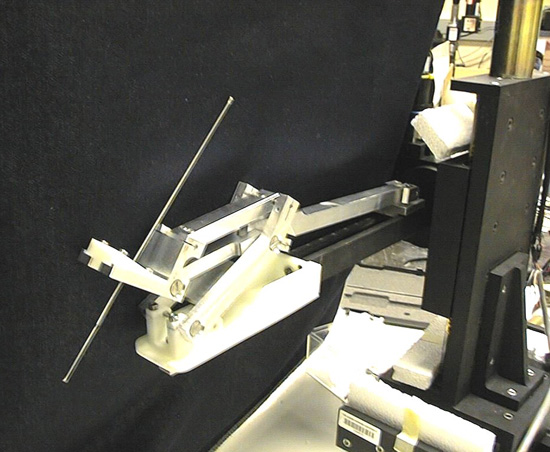
- The Steady Hand Robot is a cooperative manipulation robot that was designed and built at JHU. It allows the surgeon to manipulate a surgical tool together with the robot for purposes of filtering the surgeon's hand tremor and implementing forbidden zones where the surgeon is not allowed to move the surgical tool. This robot includes in its design a Remote Center of Motion (RCM) mechanism that allows surgeons to manipulate a surgical tool in 2 Degrees of Freedom (DoF) of tilting about a fixed point in space. This fixed point serves as a fulcrum point about which the surgical tool is manipulated (e.g. protrusion point through the abdomen in MIS surgery of the abdomen).
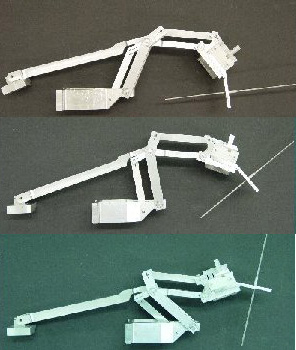
- As a part of student-mentoring project I designed a Remote Center of Motion (RCM) six bar mechanism and accompanied the graduate students (Robert Webster (now professor Webster) and Jack Li) through the process of manufacturing, assembly, and design review. This mechanism replaces the current complex and expensive RCM robot and offers a cheap and scalable design that is good for rapid prototyping and machining. The figures below show a first prototype designed for opthalmic surgery. Recently a new RCM mechanism has been scaled up and redesigned for sinus surgery.